Overview
GR-COTTON is a white and round board that has full-color LEDs to link between light and design. You can use a CR2032 battery and write a program via USB cable. Designers can check the operation using an LED and create a gadgets smoothly.
GR-COTTON Key Features
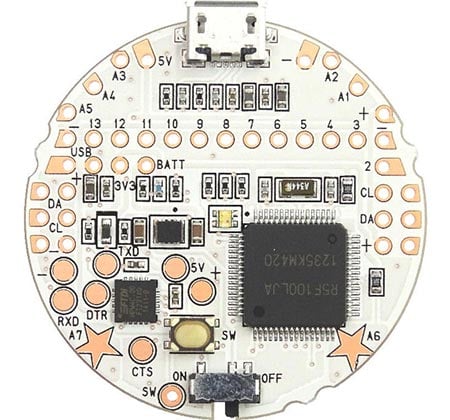
- Embeds a Renesas RL78/G13 group 16-bit microcontroller
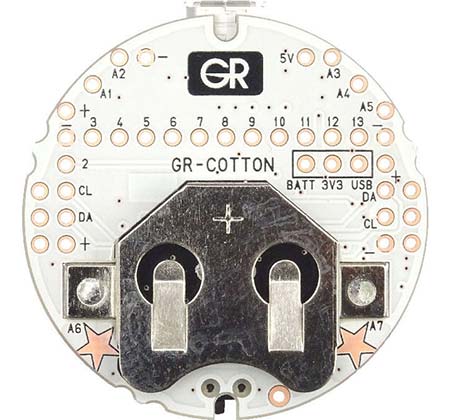
- The socket for CR2032 is mounted on the reverse side
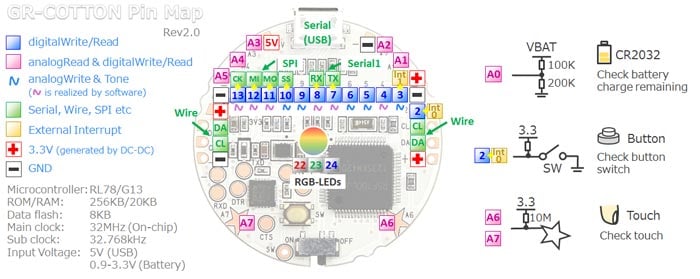
GR-COTTON Pin Map
Detailed Specification
Microcontroller
RL78/G13 (R5F100GJAF B 48-pin QFP)
ROM/RAM
256KB/20KB
Data Flash
8KB
Main Clock
32MHz (internal)
Sub Clock
32.768kHz
Operating Voltage
3.3V*
* The operating voltage of MCU is from 1.8V to 5.5V
Resources
Schematic/Design
- gr-cotton_schematic_20160114_001.CE3 (PDF)
- BOM List
- GR-COTTON Layout (PDF)
Sketch Reference
- GR-COTTON Sketch Reference
Creating & Writing Programs (Sketches)
There are several programming projects that can be done using the GR-COTTON board, including:
- Sketch Using a Web Compiler
- Sketch Using IDE for GR
Project File for e2 studio
Project file for sketching in the Eclipse-based development environment e2 studio. For downloading and installing e2 studio, please refer to the e2 studio product page.
- Click to download. Import the archive file (zip) as an existing workspace from the menu 'File' -> 'Import' in e2 studio.
Cotton Sketch v204-e2v7 Project File (ZIP)
Note: This is a project exported in e2 studio Version 5.4. It cannot be imported successfully in Version 6.0. For later versions please check that the import is compatible.
Technical Support
- E-mail: gadget_renesas@lm.renesas.com
