Overview
The GR-KURUMI board incorporates the 16-bit, low-power consumption, RL78/G13 Group MCU (R5F100GJAFB). Compatible with Arduino Pro Mini, this board can use existing sample codes, ensuring easy use with the Arduino language and standard libraries from both hardware and software aspects.
Key Features
The following special features, unavailable in Arduino Pro Mini, are perfect for designing small and low-power gadgets.
- Runs on a single-battery. Incorporates a voltage booster from 0.9V to 3.3V (or 5V)
- Includes a real-time clock with alarm function, facilitating a high-precision real-time counter (RTC)
- Low-power mode: Arduino-like library allows for easy setup of the RL78 standby mode (STOP/SNOOZE)
- GR-KURUMI's LED hair accessories: Unique GR-KURUMI features are illustrated in LEDs with glowing full-color hair accessories
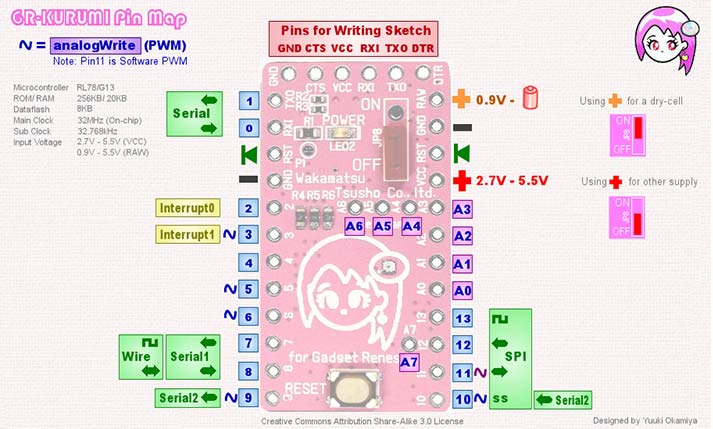
GR-KURUMI Pin Map
Detailed Specification
Microcontroller
RL78/G13 (R5F100GJAF B 48-pin QFP)
ROM/RAM
256KB/20KB
Data Flash
8KB
Frequency
32MHz (internal XO)
Sub Clock
32.768kHz
Operating Voltage
2.7V to 5.5V (Note)
Note: MCU operates from 1.6V. To ensure Arduino Pro Mini compatibility, the board offers a minimum 2.7V operation.
Resources
Sketch Reference
- GR-KURUMI Sketch Reference
Project File for e2 studio
Project file for sketching in Eclipse-based development environment e2 studio. For downloading and installing e2 studio, please refer to the e2 studio product page.
- Click to download. Import the archive file (zip) as an existing workspace from the menu 'File' -> 'Import' in e2 studio.
GR-KURUMI Sketch v204-e2v7 Project File (ZIP)
Note: This is a project exported in e2 studio Version 7.2.
Technical Support
- E-mail: gadget_renesas@lm.renesas.com
