Overview
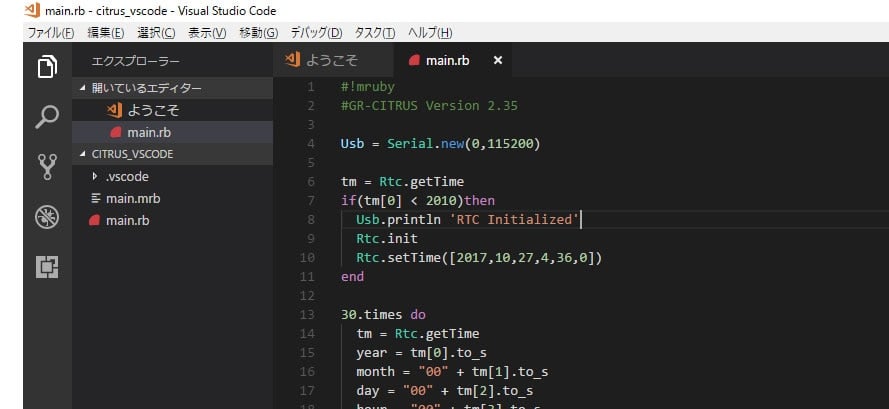
The GR-CITRUS tiny board enables easier programming with the Ruby language. You can create Ruby programs with Visual Studio Code. See VSCode Extension "Rubic". You can also develop with Rubic on the chrome app.
You can program similar to Arduino Sketch using the Renesas web compiler and IDE for GR.
By connecting with the WA-MIKAN board that has an ESP8266 module for Wi-Fi, you can prototype a system using Wi-Fi and a Micro SD card.
GR-CITRUS-FULL Key Features
GR-CITRUS (-FULL) Board
- Renesas' 32-bit RX63N Group MCU is on board
- Compatible pin array with Arduino Pro Mini
- -FULL product attached long pin socket for WA-MIKAN (The image describes normal type)
WA-MIKAN (-FULL) Board
- Wi-Fi module "ESP8266" and Micro SD socket
- -FULL has a pin socket for GR-CITRUS connection (The image describes full type)

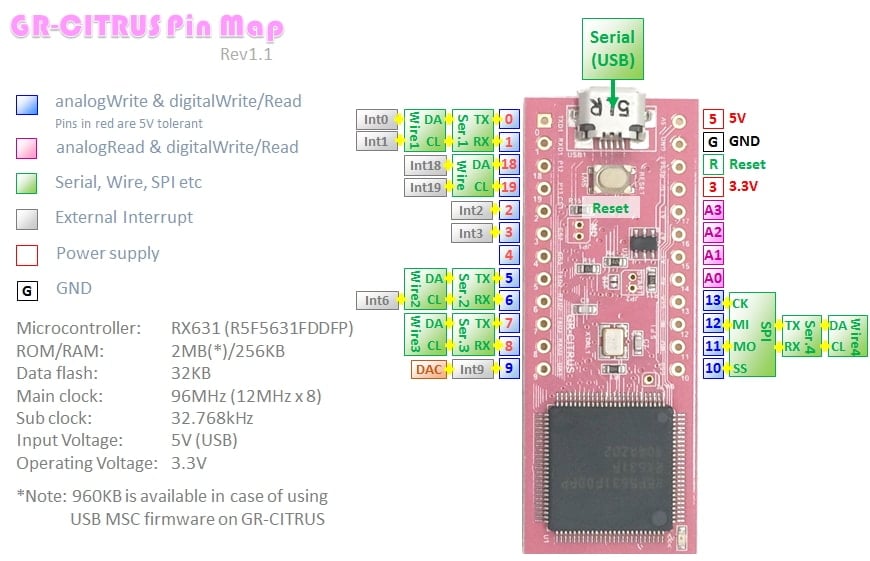
GR-CITRUS Board Pin Map
Detailed Specifications
Microcontroller
RX631(R5F5631FDDFP 100-pin QFP)
ROM/RAM
2MB/256KB
Data Flash
32KB
Main Clock
96MHz (internal)
Sub Clock
32.768kHz
Operating Voltage
3.3V
Board Function
Reset Switch, 20 expanding pin, User LED 1
Resources
Programming with GR-CITRUS
- Starting out with Rubic (Ruby version)
- Arduino Sketch with Web Compiler
- Arduino Sketch Using IDE for GR
- Cloud Access with Milkcocoa
- Play MP3, WAV file with Micro SD
- Play MP3, WAV file with embedded ROM
Schematic/Design
GR-CITRUS Schematic (PDF)
Sketch Reference
- GR-CITRUS Sketch Reference
Ruby Firmware
Download GR-CITRUS' latest firmware for Ruby. To write the firmware, please press the reset button of GR-CITRUS and recognize it as USB memory, then copy the bin file. Refer to GitHub for more about the latest firmware.
Project File for e2 studio
Project file for sketching in the Eclipse-based development environment e2 studio. For downloading and installing e2 studio, please refer to the e2 studio product page.
- Click to download. Import the archive file (zip) as an existing workspace from the menu 'File' -> 'Import' in e2 studio.
Citrus Sketch v223 Project File (ZIP)
Note: This is a project exported in e2 studio version 7.6.
USB Mass Storage Firmware
Download GR-CITRUS' USB mass storage firmware. To write the firmware, it's necessary to use Renesas Flash Programmer and close the MD jumper on the GR-CITRUS board to change to a programming mode with a USB direct connection.
At Version b, the volume label becomes "GR-CITRUS_b". Version b expands the bin write area from 528KB to 960KB. Depending on the OS of the PC, hidden files may be written to the storage, and the actual writing area may be reduced.
GR-CITRUS USB Mass Storage Firmware (ZIP)
(Version b, November 7, 2017)
