
RX Evaluation System for Stepping Motor with Resolver
This solution kit allows you to easily evaluate and study the RX family and resolver to digital converter (RDC) ICs provided by Renesas. A stepping motor with resolver...
Featured Documents:

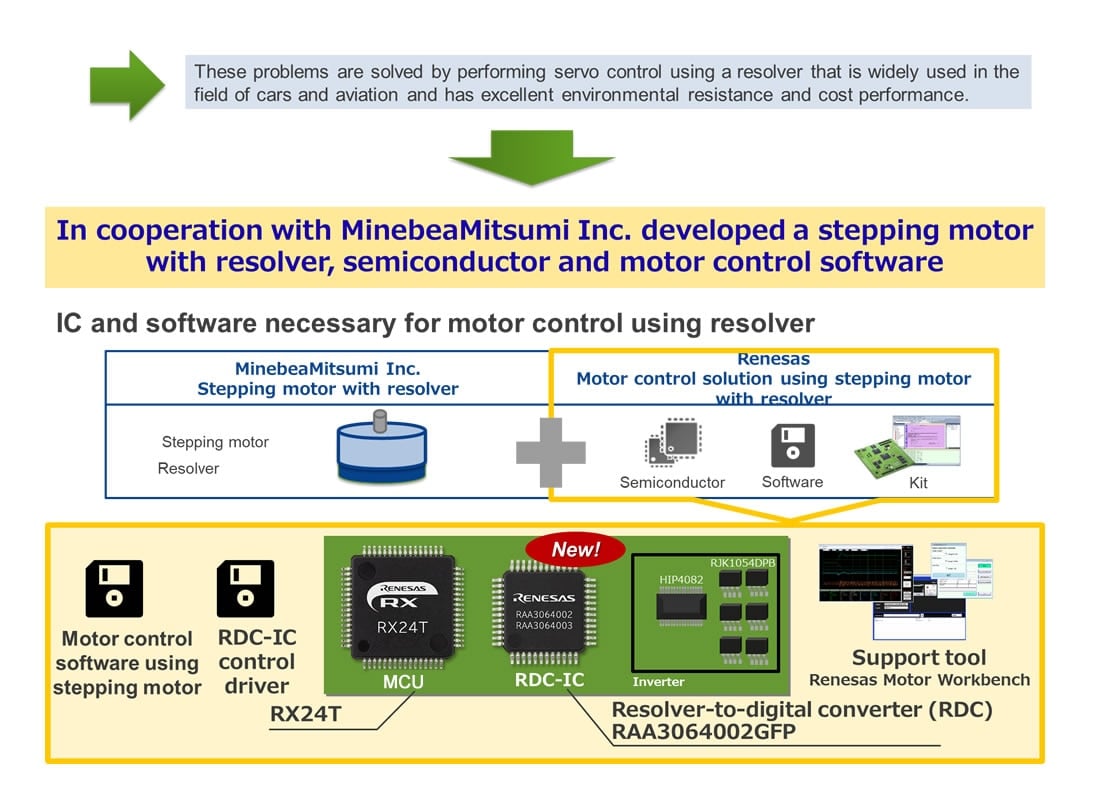
These resolver-based motor control solutions are motor control systems for industrial and consumer applications realized by combining resolver-to-digital converter (RDC) ICs and RX Family microcontrollers (MCUs). It is possible to easily control a resolver-based stepping motor or brushless DC motor using the driver software of the microcontroller. Solution kits, sample code, development support tools, and application notes for motors with resolvers are available, and motor control using resolvers can be started immediately.
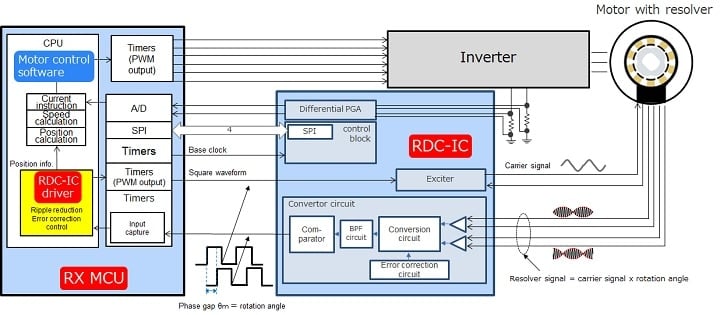
In resolver-based motor control solutions, the RDC IC and RX MCU process signals from the resolver as angle information, and the RX MCU controls the motor. A dedicated driver for the RDC IC is provided on the RX MCU, and resolver processing can be easily performed using the API.
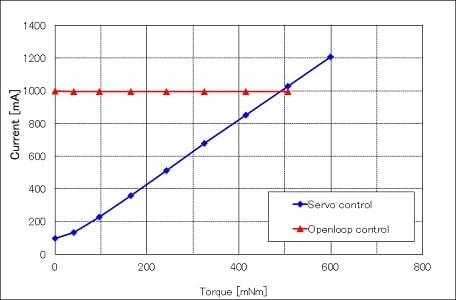
By performing servo control using a resolver, standby current can be reduced significantly, and only the current necessary for the load is consumed. In addition, the heat generation of the motor can be suppressed by reducing the current consumption.
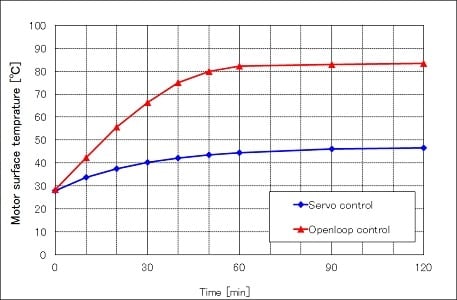
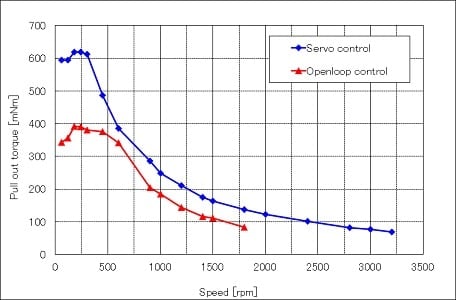
Since motor loses steps with load torque of 500mNm or more during open-loop control, no data has been acquired.
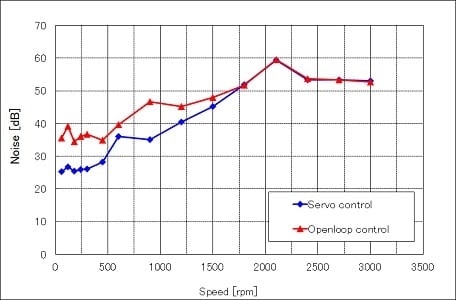
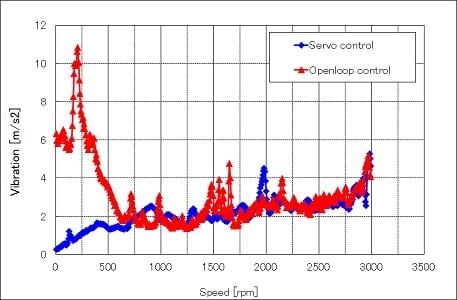
Compared to open-loop control, noise and vibrations up to the medium speed range can be suppressed by performing servo control using a resolver.
We have created a reference guide for a 2-axis arm robot using a motor control solution for stepper motor with resolver.
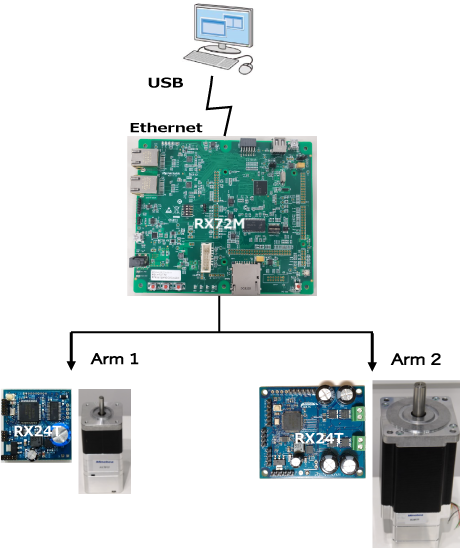
RX24T, RX72M, RAA3064002GFP/RAA3064003GFP Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping Motors Incorporating Resolvers Rev.1.00 (PDF | English, 日本語)
RX24T, RX72M, RAA3064002GFP/RAA3064003GFP Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping Motors Incorporating Resolvers Rev.1.00 - Sample Code (ZIP | English, 日本語)
This solution kit allows you to easily evaluate and study the RX family and resolver to digital converter (RDC) ICs provided by Renesas. A stepping motor with resolver...
|
|
|
|
|---|---|---|
| Type | Title | Date |
| Sample Code |
[Toolchains=CC-RX|V3.04.00]
ZIP
101.88 MB
日本語
Application:
Motor Drives & Robotics
Compiler:
CC-RX
IDE:
CS+, e2 studio
|
|
| Sample Code | ZIP 81.81 MB 日本語 Compiler: CC-RX IDE: CS+, e2 studio | |
| Sample Code | ZIP 22.06 MB 日本語 Compiler: CC-RL Function: Application Example IDE: e2 studio | |
3 items
|
||
|
|
|
|
|---|---|---|
| Type | Title | Date |
| Application Note | PDF 3.43 MB 日本語 | |
| Application Note | PDF 3.57 MB 日本語 | |
| Application Note | PDF 3.07 MB 日本語 | |
| Tool News - Release | PDF 170 KB 日本語 | |
| Application Note | PDF 4.01 MB 日本語 | |
| Application Note | PDF 495 KB 日本語 | |
| Application Note | PDF 1.09 MB 日本語 | |
7 items
|
||



