
As Industry 4.0 and Industrial IoT gain steam, the requirements of Robotics applications are becoming increasingly important. In parallel, the market requires an easy-to-use architecture, simplifying the design process and significantly reducing design risk for customers in a variety of applications. To address these needs, Renesas offers MCU-based micro-ROS solutions. The micro-ROS is an open-source project for robot control systems using ROS 2, the second generation of ROS (Robot Operating System), which is used in various robot systems, on microcontrollers.
In this blog, we’ll discuss the best hardware and software platform for micro-ROS implementation and Industrial manipulator reference that can simplify the design process using the solutions on the RA6 series MCU. The RA family and its RA6 series MCUs are suitable for IoT applications requiring Ethernet, CAN FD, future-proof security, large size of embedded RAM, and low active power consumption down to 107µA/MHz running the CoreMark® algorithm from Flash.
In cooperation with our ecosystem partner eProsima, we have developed a manipulator demo system to control a robot arm via communication on RA6M5 MCU to show the capability of MCU-based robot control of servo motors on programmed operations to grab and change the objective positions and on manual operations by a gamepad through communication with PC. This demo is simply developed using the commercial OpenMANIPULATOR-X platform.
A block is manipulated on Rviz (ROS visualization GUI), a general-purpose 3D visualization environment for robots, sensors, and algorithms to move a block from point A to point B.

Figure 1. Robot Arm
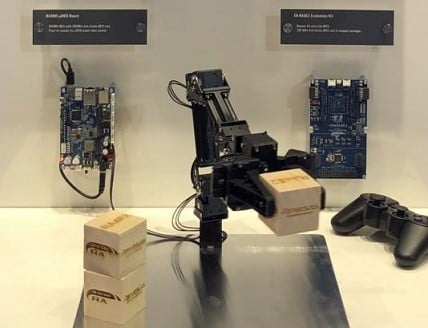
Figure 2. Robot Arm + ROS-Based Robot Body Controller

Figure 3. GUI
Functions on RA6M5:
- Uses micro-ROS through a plug-and-play USB to communicate with ROS 2
- Automatic and guided control of the manipulator servos
- The manipulator position is retrieved from the servos and published to be represented on RViz
- Watchdog: Communication issues are detected, stopping the manipulator movement for safety measurements
Functions on PC:
- Runs a micro-ROS Agent to communicate with the board
- Sends gamepad commands using a regular ROS 2 publisher
- Shows the manipulator movement on RViz
We used the ROS-based Robot Body Controller as the MCU platform to be implemented in the OpenMANIPULATOR-X. This winning combination is a comprehensive system-level solution using RA6M5. The ROS-based Robot Body Controller realizes ROS 2 nodes on a microcontroller and enables interoperability between conventional robots and IoT sensors and devices in a common framework. On the ROS-based robot body controller, system designers can control multiple servos via 1-wire UART and RS-485, which helps reduce development cost and time in the initial design of various applications, such as service robots for logistics and warehouses, security, agriculture, and healthcare, contributing to shorter time-to-market.
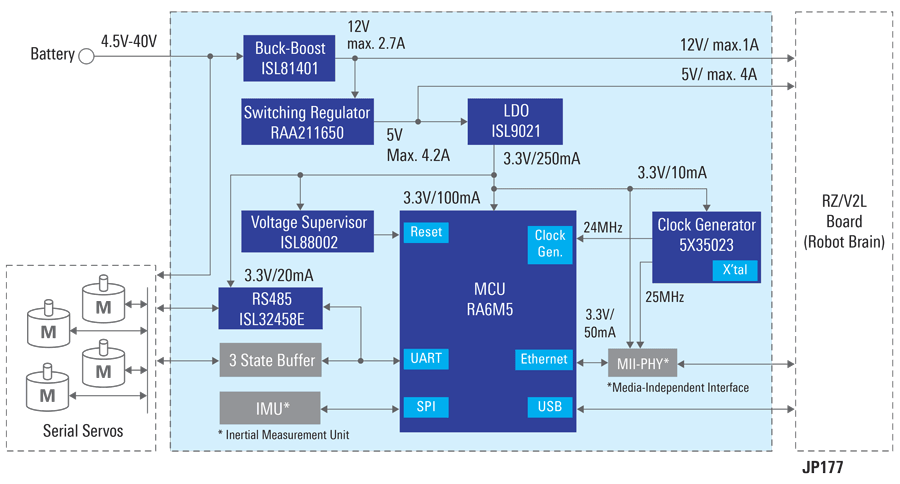
Figure 4. System Block Diagram for ROS-Based Robot Body Controller
As a general evaluation, Renesas offers the EK-RA6M5 evaluation kit. It is a micro-ROS officially supported board. All the necessary hardware features and pre-programmed codes to quickly start MCU evaluation are included in the kit. On the micro-ROS GitHub page, you can download micro-ROS software supporting both RA6M5 and RA6T2 on the Renesas e2studio and other development platforms. Check the links on support resources of micro-ROS solutions.
As eProsima commented, this solution demo showcases a simplified example of how similar approaches could be applied in much bigger and more complex industrial scenarios, such as warehouses or manufacturing lines. eProsima specializes in middleware solutions targeting the robotic, IoT, and automotive sectors and is the company behind the default middleware implementations for larger robotic systems like ROS 2 and micro-ROS, the robot operating system for microcontrollers. The collaboration between eProsima and Renesas will facilitate the expansion of new robotic applications based on embedded devices. micro-ROS bridges the gap between microcontrollers and ROS 2, and the official support of the high-performance RA Family enables customers’ cost-effective development in the areas of Industry 4.0 and Industrial IoT.
Renesas showed the Industrial manipulator demo at embedded world 2023 in Nuremberg, Germany. For more information, please visit our micro-ROS Solution website and eProsima RA Family & micro-ROS Support. RA6T2 solutions dedicated to motor solutions are also available.
Inquiries about the RA6M5 micro-ROS solution can be directed to [email protected]
For the manuals and software included with the ROS-based Robot Body Controller, please contact your Renesas sales representative or distributor.
