
モータ制御は様々な家電製品や産業機器に使用されており、年々その使用数は増え続けています。モータ制御の性能を引き出すためには位置情報が必要となるため、位置を検出するためのセンサを用いていましたが、センサのメンテナンス性やセンサ自体のコスト、信頼性・耐環境性の観点からセンサを使用しない(位置センサレスまたはセンサレス)の制御方式が主流となっています。
しかし、一般的なセンサレスの手法はモータが回転することにより生じる誘起電圧を電流から推定して位置情報を求めるアルゴリズムであり、モータの回転数が低い場合はモータの物理特性上、誘起電圧が低いため、位置情報を正確に取得することはできず、低速で動作するアプリにセンサレスベクトル制御を適用することが困難でした。今回紹介する”全速度域位置センサレスベクトル制御”は全ての速度でセンサレスベクトル制御を適用できるようにするソリューションです。これにより、全ての速度で効率的な制御を行うことができ、低消費電力や製品の性能向上に貢献します。今回のソリューションでは、モータ制御向けRX製品のRX66Tを使用します。
全速度域位置センサレスベクトル制御を行うためのモータ
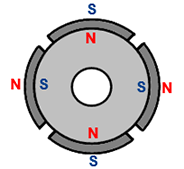
今回のソリューションを活用頂くためには、モータの種類と特長を把握する必要があります。永久磁石同期モータ(ブラシレスDCモータ)には大きく2種類のモータがあります。埋込磁石型同期モータ(IPMSM : Interior Permanent Magnet Synchronous Motor)と表面磁石型同期モータ(SPMSM : Surface Permanent Magnet Synchronous Motor)です。これらは磁石の構成が異なるため、モータの特性に差異があります。特に、IPMSMはモータの回転している位置によって磁気抵抗が異なる(突極性がある)という特徴があり、この突極性を利用して低速時でも高い精度で位置情報の取得が可能となります。これが全速度域でセンサレスベクトル制御を可能とする”肝”です。

IPMSM
SPMSM
メリットとデメリット
全速度域位置センサレスの制御はメリットだけでなくデメリットもあるため、全てのアプリケーションに適用するのは適切ではありません。ここではソリューションのメリットとデメリットを紹介します。通常のセンサレスベクトル制御では、低速時はフィードバックを行わないオープンループで制御することを想定して比較を行ってみました。
| 項目 | 通常のセンサレス ベクトル制御 |
全速度域位置センサレス ベクトル制御 |
|---|---|---|
| CPUの負荷,メモリサイズ | 通常のセンサレスより微増 | |
| 消費電力 | ||
| 始動の早さ | ||
| 低速回転時の負荷運転 | ||
| 高速回転時の負荷運転 | ||
| 騒音 | (低速時のみ高調波の音あり) |
|
| 適用モータ | (一般的なPMモータ) |
(IPMSMのみ) |
メリットとしては、低速回転時でもセンサレスベクトル制御を適用することで、低消費電力化や安定したトルク出力、高速始動などを実現できることが挙げられます。通常のセンサレス制御では、一般的に強制励磁を用いた磁石の引き付けによる位置の固定処理が必要となるため、始動までに時間がかかることと、一定以上の負荷があると脱調することが難点でした。しかし、IPMSMを使った全速度域センサレスベクトル制御では磁石の初期位置を精度よく推定できるため、通常のセンサレス制御よりも十分に早く安定した始動が可能となります。
デメリットとしてはCPUの演算処理が少なからず増えること、高調波を使うことによる音が挙げられます。モータ駆動時の高調波の音がユーザに聞こえるため、静かな場所で使用するアプリには適さないでしょう。適用できるモータも全てのPMモータには適用できず、突極性を持つIPMモータが求められます。今回のソリューションで必要な突極性は、d軸とq軸のインダクタンスに差分が20%以上となります。
これらの特長をまとめると、全速度域センサレスモータソリューションは高速回転がメインとなるアプリには効果が小さくなり、騒音を気にするアプリでは対策などを検討する必要があります。しかし、低速回転で動作するアプリや消費電流を気にするバッテリ駆動のアプリ、屋外や工場等で騒音の影響が小さいアプリには非常に適しており、これまでできなかった速度域でセンサレスベクトル制御を適用することができるようになります。
ターゲットアプリケーション:
- ポンプ
- 搬送装置(コンベア)
- 圧縮機(コンプレッサ)
- 家電製品
全速度域位置センサレスモータソリューション
全速度域位置センサレスモータソリューションは、ルネサスから提供するアプリケーションノートやサンプルソフト、RX66T搭載のCPUカードに加えて、弊社パートナー製のインバータボードと一般販売されているIPMモータにより実現することができ、評価環境をすぐに立ち上げることができます。このソリューションを活用してモータの特性を実験的に把握・理解し、パラメータを調整して実際のアプリに適用するといった開発の一助となることを期待しています。
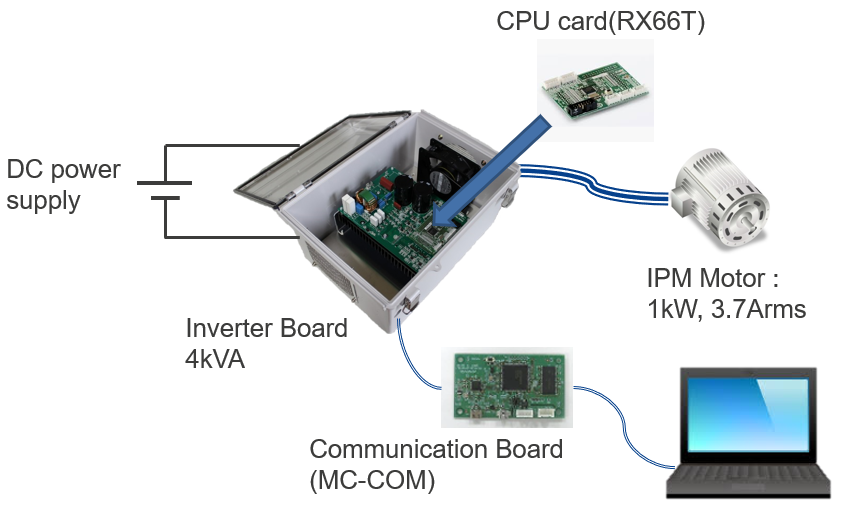
システム構成
全速度域位置センサレスソリューションの詳細は以下をご参照ください。
- 全速度域センサレスモータソリューション
- RXファミリ IPMSM の全速度域位置センサレスベクトル制御 Rev.1.00 (PDF | English, 日本語)
- RXファミリ IPMSM の全速度域位置センサレスベクトル制御 Rev.1.00 (ZIP | English, 日本語)
最後に
今回紹介したソリューションはRX66Tを使用して全速度域で位置センサレスベクトル制御を行うソリューションです。全ての速度領域でベクトル制御を行い、低消費電力化・効率化をご検討のお客様はぜひ弊社ソリューションをご活用ください。RX66Tを含むRX-Tシリーズでは今回紹介したソリューション以外にも、SPMSMを使ったセンサレスベクトル制御やエンコーダを使用したベクトル制御などのサンプルコードやアプリケーションノートを用意しています。以下、ドキュメント一覧を合わせてご覧いただき、RX製品によるモータ制御を試してみてください。
ドキュメント
|
|
|
|
|---|---|---|
| 分類 | タイトル | 日時 |
| アプリケーションノート | PDF 3.30 MB English | |
| アプリケーションノート | PDF 2.77 MB English | |
| アプリケーションノート | PDF 2.42 MB English | |
3件
|
||
ダウンロード
|
|
|
|
|---|---|---|
| 分類 | タイトル | 日時 |
| サンプルコード |
[Toolchains=CC-RX|V3.06]
ZIP
150.22 MB
English
アプリケーション:
産業用機器
Compiler:
CC-RX
Function:
Application Example
IDE:
CS+ for CC, e2 studio
|
|
| サンプルコード |
[Software=RX Smart Configurator|v2.15.0],[Toolchains=CC-RX|v3.04.00]
ZIP
15.65 MB
English
アプリケーション:
再生可能エネルギー&グリッド, 産業用機器
Compiler:
CC-RX
Function:
Application Example
IDE:
CS+ for CC, e2 studio
|
|
| サンプルコード | ZIP 80.40 MB | |
3件
|
||