
インダストリー4.0や産業用IoTの盛り上がりに伴い、ロボティクスへのニーズはますます高まっています。並行して、市場からは使いやすいアーキテクチャを提供し、設計プロセスを簡素化し、さまざまなアプリケーションの顧客の設計リスクを大幅に低減することが求められています。micro-ROS は 多くのロボットシステムで採用されているROS(Robot Operating System)の第二世代であるROS 2をマイクロコントローラで使用するためのオープンソースプロジェクトです。
本ブログでは、micro-ROS実装に最適なハードウェアおよびソフトウェアプラットフォームと、RA6シリーズMCUのソリューションを使用して設計プロセスを簡素化できる産業用マニピュレータリファレンスについてご説明します。RAファミリとRA6シリーズMCUは、イーサネット、CAN FD、将来性のあるセキュリティ、大容量の内蔵RAM、およびフラッシュメモリからCoreMark®アルゴリズムを実行する際の消費電力を107uA/MHzと極めて低い水準に抑えることが可能なため、低消費電力を必要とするIoTアプリケーションに最適です。詳しくはRAファミリのウェブサイトをご覧ください。
ルネサスのパートナー社であるeProsimaの協力のもと、RA6M5上でロボットアームを通信制御するマニピュレータデモシステムデモを開発し、パソコン通信により、プログラムされたサーボモータで対象物を検知及び移動、また、手動操作によるロボット制御機能を実証しました。
ロボットアームには市販のOpenMANIPULATOR-Xを使用しており、ロボットやセンサ、アルゴリズム向けの汎用の3DビジュアライゼーションであるRviz(ROS visualization GUI)上からブロックをA地点からB地点に移動させます。

図1. ロボットアーム
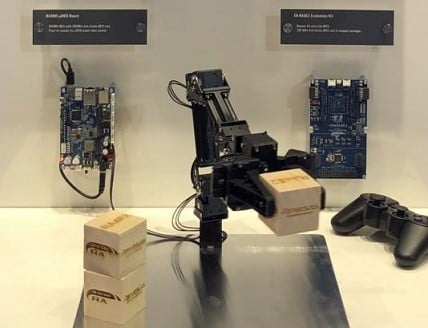
図2. ロボットアーム + RA6M5 ROSベースのロボット本体コントローラ

図3. GUI
RA6M5は次の動作を実行
- ROS 2と通信するためにUSBのプラグ&プレイを通してmicro-ROSを使用
- マニピュレータのサーボを自動的に誘導制御
- マニピュレータの位置はサーボから取得し、(ROS 2上で)パブリッシュすることで RViz に表示
- ウォッチドッグ機能として、通信障害を検知したとき、安全確保のためマニピュレータ動作を停止
PCは次の動作を実行
- ボードと通信するためにmicro-ROSのエージェントを起動
- 定期的にROS 2のパブリッシャーとしてゲームパッドのコマンドを送信
- RViz上でマニピュレータの動作を表示
OpenMANIPULATOR-Xに実装するMCUプラットフォームとしてROSベースのロボット本体コントローラを使用しています。ルネサスではRA6M5を使用したROSベースのロボット本体コントローラとして包括的なシステムレベルのブロック図をウィニングコンビネーションWebサイトでご紹介しています。 ROSベースのロボット本体コントローラはROS2ノードをマイクン上に実現し、従来のロボットやIoTセンサ及びデバイスとの相互運用を可能にします。 ROSベースのロボット本体コントローラでは、シングルワイヤUART及びRS-485を介して複数のサーボを制御可能なため、物流・倉庫用のサービスロボット、セキュリティ、農業、ヘルスケアなど、様々なアプリケーションの開発初期における設計リスクを低減し、市場投入までの時間短縮に貢献します。
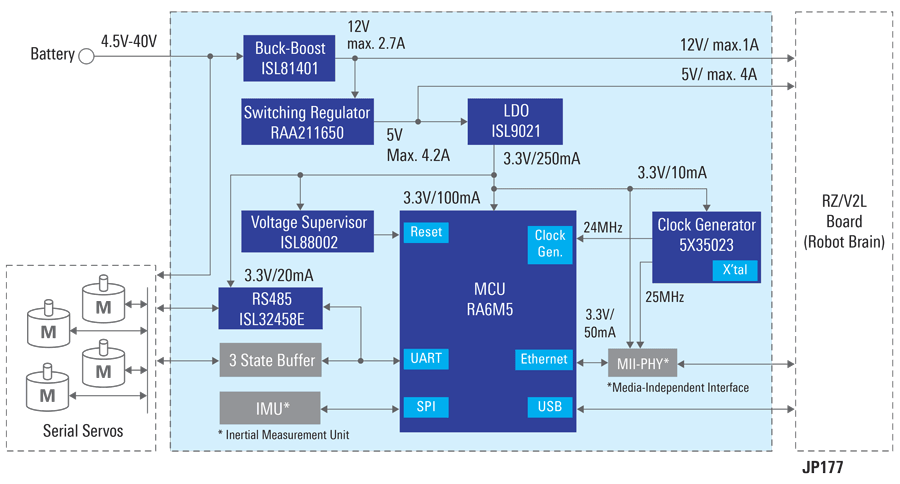
図4. ROSベースのロボット本体コントローラ
一般評価用として、EK-RA6M5(評価キット)をご提供しています。EX-RA6M5はRA6M5用マイコン評価キットでmicro-ROS協会のofficially supported boardsとして認定されているボードです。マイコン評価に必要な全てのハードウェア機能とあらかじめプログラムされたコードが書き込まれています。
micro-ROSのGitHubページではルネサスe2studio及びその他の開発プラットフォーム上でRA6M5及びRA6T2 をサポートするmicro-ROSソフトウェアパッケージを以下よりダウンロードできます。詳細はmicro-ROSソリューションのWebページのサポート項目をご参照下さい。
e-Prosimaは以下のようにコメントしています。本ソリューションは倉庫や製造ラインなど、より大規模で複雑なアプリケーション用途において、簡略化した実装アプローチを紹介したデモです。eProsima社は、ロボット、IoT、自動車分野をターゲットとしたミドルウェアソリューションを専門としており、ROS 2やマイクロコントローラ用ロボットオペレーティングシステムであるmicro-ROSなどの大型ロボットシステム用のデフォルトミドルウェア実装を手掛けています。micro-ROSは、マイクロコントローラとROS 2間のギャップを埋め、高性能なRAファミリに対応しており、インダストリー4.0や産業用IoTの分野において、費用対効果の良い開発にご提供します。
本ソリューションは2023年3月14日から16日にドイツのニュルンベルクで開催されるembedded world 2023のルネサスブースにて展示しました。ソリューション詳細はmicro-ROSソリューション、eProsima RA Family & micro-ROS Supportをご参照下さい。
ソリューションサポートに関するお問い合わせはこちら:[email protected]
尚、ROSベースのロボット本体コントローラに同梱するマニュアル、ソフトウェアに関しては、ルネサス営業拠点・及び特約店にお問い合わせ下さい。
ニュース&各種リソース
| タイトル | 分類 | 日時 |
|---|---|---|
| Robot arm demo: Renesas featuring micro-ROS at embedded world 2023 | 外部リンク | 2023年3月17日 |
| ルネサスとeProsima社は共同で、ロボット開発用フレームワークのmicro-ROSをRAマイコンに実装、産業およびIoT分野でのロボット導入を促進 | ニュース | 2021年9月2日 |