
負荷検出とは?なぜそれが重要か?
センサーレスモーター制御アルゴリズムは、起動中に生成する必要のあるトルクを認識していません。 モーターにかかる未知の負荷が大きすぎるものの、逆に印加電流が小さすぎた場合、ローターを正しい方向に動かすことができない可能性があります。 これを補うための一般的なアプローチは、大きな負荷の下でも回転を開始するのに十分な大きさの開始電流を注入することです。 ただし、これは軽負荷であっても同じ大きな始動電流を使用していることを意味します。 代わりに、負荷を予測できれば、起動電流を微調整することで、性能を向上させ、モーターへのストレスを軽減することができます。
負荷検出はどのように機能するか?
ルネサスの RealityCheck™ Motor ツールを使用して、モータの起動シーケンスの開始時の負荷を推定するためのAI/MLベースのソリューションを開発しました。 AI分類モデルは完全にセンサーレスであり、モーター制御のファームウェアを更新するだけで済みます。
どのような仕組みか?
- モーター制御システムの重要な変数を検出
- Reality AI特徴空間を適用して関連情報を抽出
- Reality AI推論を使用して、負荷のかかったモーターを回すために必要なトルクを特定します
- 特定された値を供給して、起動電流を最小トルクに調整します
必要なトルクが予想よりも小さい場合、モーターの動作を開始するには、より低い始動電流で十分であるため、効率が向上します。
ルネサスのアプリケーション例:
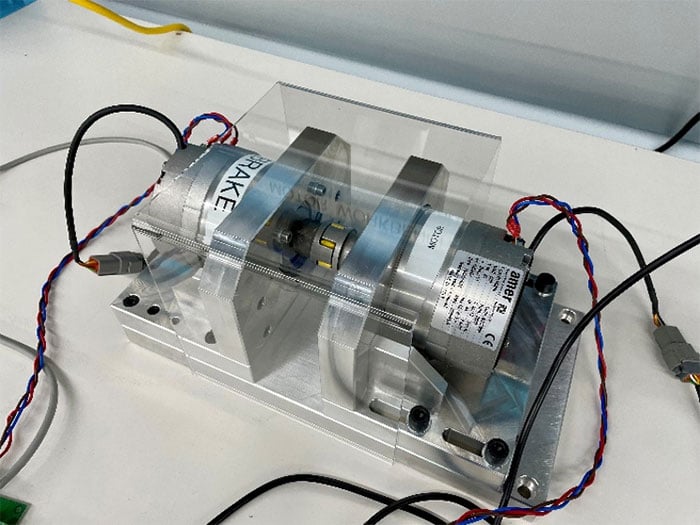
アプリケーション例を作成するために、2つのBLDCモータシステムを準備し、それぞれが RA6T2モータ制御キットによって駆動されます。 プライマリモータは、モータシャフト間のインターロック機構によってセカンダリ「ブレーキ」モータに接続されました。 この設定を使用すると、ブレーキ モーターに適用される電流を調整することで、プライマリ モーターの負荷をシミュレートできます。 テストの結果、私たちのモデルは、ほぼ完璧な精度で6種類の荷重を区別できることが明らかになりました。 このモデルでは、合計で約 12.5KB のフラッシュ メモリと 6.5KB の RAM 程しか必要としません。
このアプリケーション例を作ってみましょう
まず、いくつかの負荷設定ごとに適切な数のデータサンプルを収集しました。 評価用として、データをトレーニングセットとテストセットに分割します。 その後、 Renesas Reality AIクラウドプラットフォーム*にデータをアップロードし、クラウドツールを使用してモデルのトレーニングとテストを行いました。
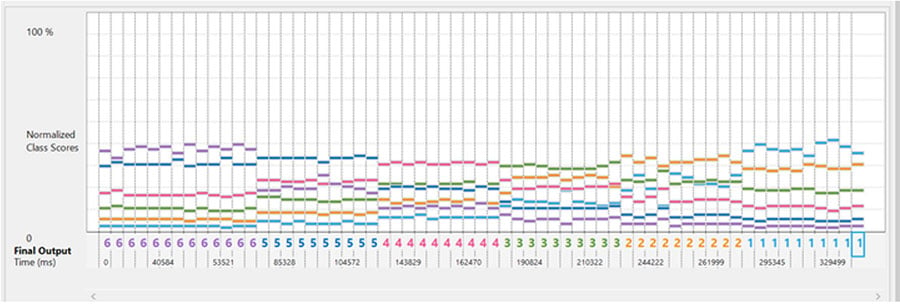
最後に、Renesas e² studio IDEを使用してモータ制御アプリケーションへ組み込めるCパッケージを作成しまし。 Reality AI Tools Suiteの一機能であるAI Live Monitor™では、モーターへの負荷を変化させながらモーターを繰り返し始動することで、AIアプリケーションをリアルタイムでテストしました。
まとめ
このアプリケーション例は、モータ制御設計の品質と効率を向上させるための新しい革新的なアプローチを示しています。 RealityCheck Motorが提供するセンサー不要のAIモデルをご利用いただくことで、追加コストがないままモーターの起動パフォーマンスを改善し、モーターの寿命を延ばすことができます。
RealityCheck™ Motor Toolbox で詳しくご確認ください。デモ動画もご準備しています。また、お客様のシステムで評価やテストをご希望の場合はウェブページから直接デモのリクエストもご依頼いただけます。
参照
* Reality AIクラウドプラットフォーム – データをReality AIツールにアップロードし、AI Explore™およびTry New Data™機能を使用してAIモデルのトレーニングとテストを行いました。