概要
説明
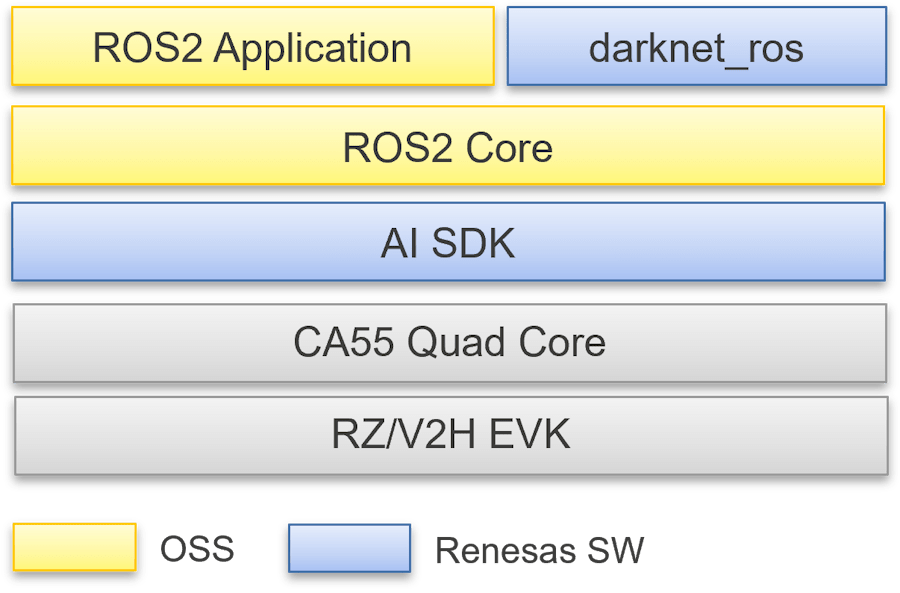
ロボットオペレーティングシステム(ROS)は、ロボットアプリケーションを開発するためのさまざまなソフトウェアライブラリとツールで構成されています。 ROS2はROSの次世代バージョンであり、組み込みMCUなどのさまざまなプラットフォームに適応します。 ROS2のターゲットアプリケーションには、サービスロボット、ロボットアーム、AGV(無人搬送車)、AMR(自律移動ロボット)などのアプリケーションが含まれます。
RZ/V2H ROS2パッケージは、RZ/V2H MPUへのROS2のインストール手順を提供します。 RZ/V2H上では、ROS2標準アプリケーション(cartographerなど)や、AIアクセラレータ「DRP-AI」を用いたサンプルアプリケーション(darknet_ros)の実行が可能です。
darknet_rosを実行する場合は、ROS2 Support Packageの「Case1: ROS2 Core (Yocto Native) / Galactic」をインストールしてください。
ROS2(OSS部分)の動作はルネサスではサポート対象外です。 ルネサスは、各パッケージに同梱されているアプリケーションノートに記載されている動作のみをサポートしています。
画像
ソフトウェア一覧
ROS2 パッケージには、以下のパッケージが用意されています。
|
|
|
|
|---|---|---|
| RZ/V2H ROS2 サンプルアプリケーションパッケージ RZ/V2H ROS2 Sample Application Packageは、RZ/V2H上で動作するアプリケーションを提供します。
|
Software Package | ルネサス |
| RZ/V2H ROS2サポートパッケージ RZ/V2H ROS2サポートパッケージは、RZ/V2HへのROS2のインストール手順を提供します。
|
Software Package | ルネサス |
2件
|
||