BLDCモータ入門:2 of 3
BLDCモータは効率が良く小型化が可能、長寿命で制御性も良いとあって大いに注目されています。今回はBLDCモータを上手に回すための制御方法を学びましょう。
つないだだけでは回らない
典型的なBLDCモータの一種である、インナーローター型BLDCモータの外観と内部構造を下に示します(図1)。ブラシ付きDCモータ(以下、DCモータ)は回転子にコイルがあり、外側に永久磁石が置かれていました。BLDCモータでは回転子に永久磁石が付き、外側はコイルとなっています。BLCDモータは、回転子にコイルがなく永久磁石ですから、回転子に電流を流す必要がありません。電流を流すためのブラシが無い「ブラシレス」が実現しました。
その一方で、DCモータと比べて制御が難しくなりました。モータから出ているリード線を電源につなげば良い、というわけには行きません。そもそもリード線の本数が違います。「プラス(+)とマイナス(−)を電源につなぐ」のとは異なるようです。

図1:BLDCモータの外観と内部構造
回転子は永久磁石なので、電流は流れません。ブラシや整流子が不要となり長寿命化が図れます
磁束の方向を変える
BLDCモータを回すためには、コイルに与える電流の方向とタイミングを制御しなければなりません。図2-Aは、BLDCモータの固定子(コイル)と回転子(永久磁石)を模式化したものです。この図を使って、回転子が回る様子を考えましょう。コイルは3個使うとして考えます。実際には、6つまたはそれ以上の数のコイルを使うこともありますが、原理を考える上では120度毎に置かれた3つのコイルを使うこととします。
モータは、電気(電圧・電流)を機械的な回転に置き換えます。図2-AのBLDCモータでは、どのようにモータが回転するのでしょうか。まず、モータの中で起きていることを見てみましょう。
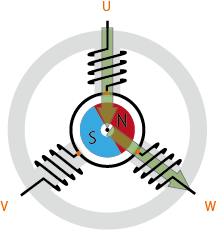
図2-A:BLDCモータの回転原理
BLDCモータには120度ずつ離れた3つのコイルが置かれて、通電する相やコイルに流す電流を制御します
図2-Aにあるように、BLDCモータでは3つのコイルを使います。この3つのコイルは、電流を流すと磁束を発生するものであり、U、V、Wと名が付けられています。このコイルへ電流を流してみましょう。コイルU(以下、「コイル」を省略します)に流す電流の経路をU相、VのそれをV相、WならばW相、と表記します。では、U相を見てみます。U相に電流を流すと、図2-Bにあるような矢印の方向の磁束が発生します。実際には、U、V、Wの片方のリード線は互いにつながっているので、U相だけに電流を流すことはできません。ここでは、U相からW相に電流が流れ、図2-CのようにUとWから磁束が発生するとします。UとWの2つの磁束を合成すると、図2-Dの大きな磁束となります。この合成磁束と中央の永久磁石(回転子)のN極が同じ方向になるように永久磁石が回転します。
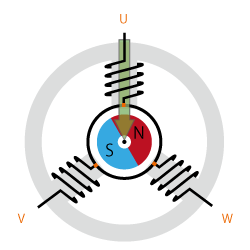
図2-B:BLDCモータの回転原理
U相からW相に電流を流します。まず、コイルU部分のみに着目すると矢印のような磁束が発生します
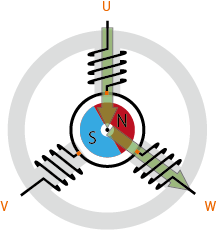
図2-C:BLDCモータの回転原理
U相からW相に電流が流れ、方向が異なる2つの磁束が発生します
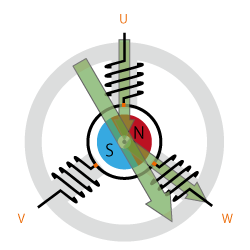
図2-D:BLDCモータの回転原理
U相からW相に電流が流れたとき、2つの磁束を合成した磁束が発生したと考えます
合成磁束の方向を変えれば、永久磁石はそれに従ってついてきます。永久磁石の位置に合わせて、U相、V相、W相の通電する相を切り替えることで合成磁束の方向を変更し、これを連続することで合成磁束が回転して回転磁界が生まれ、回転子が回ります。図3に通電する相と、合成磁束の関係を示します。この例では、通電モードを1から6に順番に変更させると時計回りに合成磁束が回ります。合成磁束の向きを変更する速度を制御することで、回転子の回転速度を制御することができるのです。この6つの通電するモードを切り替えてモータ制御を行う制御方法を「120度通電制御」と呼びます。

図3:回転子の永久磁石が合成磁束に引かれるように回ることで、モータの軸が回ります
滑らかな回転には正弦波制御
さて、120度通電制御では合成磁束の向きが回転するとは言え、その方向は6通りに過ぎませんでした。たとえば、図3の「通電モード1」から「通電モード2」に変化したとき、合成磁束の方向は60度変化します。すると、回転子も引きつけられるように回転します。その次に「通電モード2」から「通電モード3」に変化すると、またも合成磁束の方向は60度変化します。再び、回転子はこの変化に引きつけられます。これが繰り返されます。この動きは、「カクカク」感があるものとなります。時には、この動きが騒音にもなります。
120度通電制御の欠点を解消し、滑らかな回転を実現するのが「正弦波制御」です。120度通電制御では、合成磁束が6方向に固定されていました。これを連続的に変化するように制御します。図2-Cの例では、UとWが作る磁束は同じ大きさでした。しかし、U相、V相、W相を上手に制御すると、コイル毎に異なる大きさの磁束を作ることができ、合成磁束の方向を細かく制御できます(図4)。こうして、U相、V相、W相の各相に流れる電流の大小を調整しながら生成される合成磁束が、細かく連続的に生成されるように制御する事により、スムーズにモータを回転させることが可能になるのです。
図4:正弦波制御
正弦波制御では、3相に流す電流を制御して合成磁束を作り滑らかな回転を実現します。120度通電制御では作れなかった方向に合成磁束を作り出せます
インバータを使ってモータ制御
では、U、V、Wの各相に流す電流は、どのようなものでしょうか。分かりやすい120度通電制御で考えてみます。もう一度図3を見てください。通電モード1の時は、UからWへ、通電モード2の時はUからVへ電流が流れます。電流が流れるコイルの組み合わせが変わる度に合成磁束の矢印の方向が変化するのがわかります。では、通電モード4を見てください。ここでは、WからUに電流が流れます。通電モード1とは反対の方向ですね。このような電流の方向転換は、DCモータでは整流子とブラシの組み合わせで行っていました。しかし、BLDCモータではそのような接触型の方法は使いません。インバータ回路を使って電流の向きを切り替えます。BLDCモータの制御では、一般的にインバータ回路が使われるのです。
また、インバータ回路では各相に印加する電圧を変化させて、電流値を調整することができます。電圧の調整はPWM(Pulse Width Modulation=パルス幅変調)がよく利用されます。PWMは、パルスのON/OFFの時間の長さを調整して電圧を変化させる方法で、ON時間とOFF時間の比率(デューティー比)変化が重要な点となります。ONの比率が高いと、電圧を上げたと同様の効果が得られ、ONの比率が下がれば、電圧が下がったのと同様の効果が得られます(図5)。PWM実現のために、専用のハードウェアを持ったマイコンもあります。正弦波制御を行う際は3相の電圧を制御するため、2相にしか通電しない120度通電制御に比べてソフトウェアはやや複雑になります。インバータは、BLDCモータを駆動するのに必要な回路です。交流モータにもインバータは使われますが、家電製品で「インバータ式」とうたわれれば、ほとんどの場合はBLDCモータが使われていると思ってよいでしょう。

図5:PWM出力と出力電圧の関係
ある時間内のON時間を変更して、電圧の実効値を変更します。ON時間が長いほど実効値は、100%の電圧を掛けた時(ONの時)の電圧に近づきます
位置センサを使うBLDCモータ
ここまで、BLDCモータの制御の概略を述べてきました。コイルが作る合成磁束の方向を変化させることで、回転子の永久磁石を追随させるのがBLDCモータです。
As we have seen, we drive BLDC motors by continually changing the directionality of the flux produced by the coils. The permanent magnets on the rotor continually chase the shifting rotating magnetic field, causing the rotor to turn.
実は、これまでの説明で一点、述べていなかったことがあります。それはBLDCモータにおけるセンサの存在です。BLDCモータの制御は、回転子(永久磁石)の位置(角度)にあわせて行います。そのため、回転子の位置を知るセンサが必要になります。センサが無く、永久磁石の向きがわからないときは、意図しない方向に回転子が回ってしまうこともあります。センサからの情報があれば、このような事は起きません。
表1は、BLDCモータの主な位置検出用センサの種類を示しています。制御方式によっても、必要なセンサは異なります。120度通電制御では、どの相に通電するかを判断するため、60度ごとに信号が入力されるホール素子が適しています。一方、細かく合成磁束を制御する「ベクトル制御」(次項で説明)には、レゾルバや光学式エンコーダといった精度の高いセンサが有効です。
これらのセンサにより位置の検出が可能になるメリットがありますが、代わりにデメリットもあります。センサが塵や埃に弱い場合もあり、メンテナンスも欠かせません。利用可能な温度範囲が狭くなることもあります。センサを使うことやセンサのための配線の増加によりコストも上がりますし、そもそも高精度なセンサは高価です。そこで、位置検出用のセンサを使わないことで部品コストを抑え、センサ関連のメンテナンスが不要な「センサレス」方式も登場しています。ただし、今回は原理を説明していますから、位置センサからの情報を得ているものとして考えます。
| センサ種類 | 主な用途 | 特徴 |
|---|---|---|
| ホール素子 | 120度通電制御 | 60度毎に信号を取得する。比較的安価。熱に弱い。 |
| 光学式エンコーダ | 正弦波制御・ベクトル制御 | 元の位置からの移動量が分かるインクリメンタル型と現在位置の角度が分かるアブソリュート型がある。 高分解能だが塵や埃に弱い。 |
| レゾルバ | 正弦波制御・ベクトル制御 | 高い分解能。堅牢であり劣悪な環境でも使用可能。 |
表1:位置検出用センサの種類と特徴
ベクトル制御で常に高効率
正弦波制御は3相に電流を流して滑らかに合成磁束の方向を変化させるため、回転子が滑らかに回ります。120度通電制御では、U相、V相、W相の内の2相を切り替えてモータを回転させましたが、正弦波制御では3相の電流を適切に制御しなければなりません。さらに制御する値は常に変化する交流値であるため、より制御を困難にしています。
そこで登場するのがベクトル制御です。ベクトル制御では「座標変換」を行い、3相の交流値を2相の直流値として扱い制御の演算を行うことができるため、制御をシンプルにすることができます。ただし、ベクトル制御の演算には高い分解能で回転子の位置情報が必要です。位置検出には、光学式エンコーダやレゾルバなどの位置センサを用いる方式と、各相に流れる電流値から位置を推定するセンサレス方式があります。この座標変換によりトルク(回転力)に関する電流値を直接制御できるようになり、無駄な電流の無い高効率な制御を実現できます。
しかし、ベクトル制御では三角関数を用いた座標変換や、複雑な演算処理が必要になります。そのため、制御用マイコンにはFPU(浮動小数点演算器)を搭載するなど、多くの場合、演算能力が高いものが用いられます。
次回は、ルネサスの開発キット「24V Motor Control Evaluation System for RX23T(通称”モータRSSK”)」を使って、実際にモータ制御を行っていきます。
BLDCモータ入門
- BLDCモータとは
- BLDCモータの制御
- ルネサスが回す、BLDC モータ