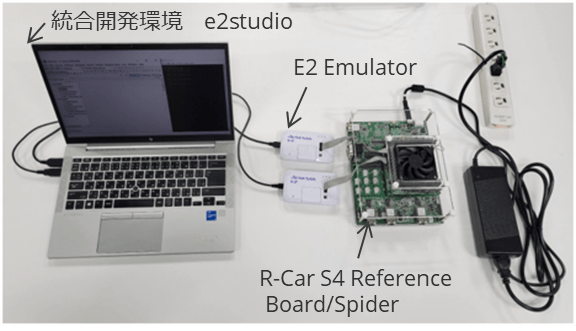
R-Car S4 開発ボード / Spider
新しいE/Eアーキテクチャへの対応を実現するため、車載ゲートウェイアプリケーション用のハードウェア、ソフトウェアを完備した開発環境を提供します。
新しいE/Eアーキテクチャへの対応を実現するため、車載ゲートウェイアプリケーション用のハードウェア、ソフトウェアを完備した開発環境を提供します。
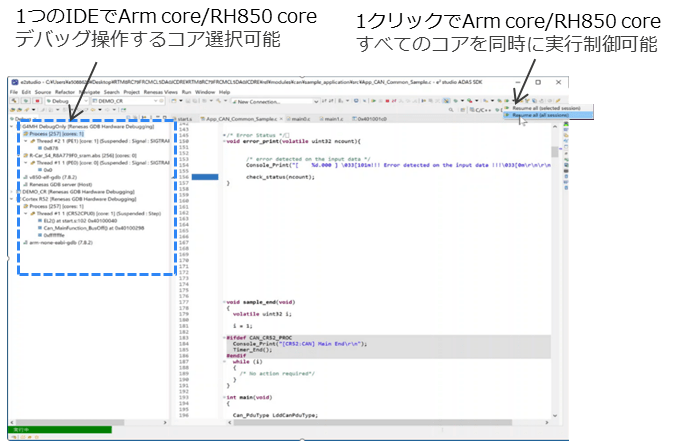
車載ECU、特にセントラルECUなどの高度な処理を備えたECUには、1つのSOC内に複数のコアが装備されており、これらは連携して動作します。複数コア上で動作するソフトウェアを組み合わせて動作させた場合、どのソフトウェアが問題を発生させているかを特定する際に時間がかかります。
従来の開発ツールを使用した課題について事例を以下に説明します。
右図で、一番左のG4MH coreで動いているSoftware-Aに何か異常が起きて、デバッグしようとしたとき、従来であればG4MH coresの動作を止めて、レジスタやメモリ、変数の状態をデバッガを使って調べる、というのはよく行う方法です。ところが、G4MH coreの動作を止めても、他のコアはそのまま動いてますので、Software-Aで問題が起きた時にSoftware-BやCで何が起きていたのか見ようとしても、Software-BやCはもっと先に進んでしまっているか、場合によってはSoftware-Aを止めていることで動作がおかしくなってしまい、肝心の問題点にたどり着けない、ということが起こりえます。
Multi-Core Use Case

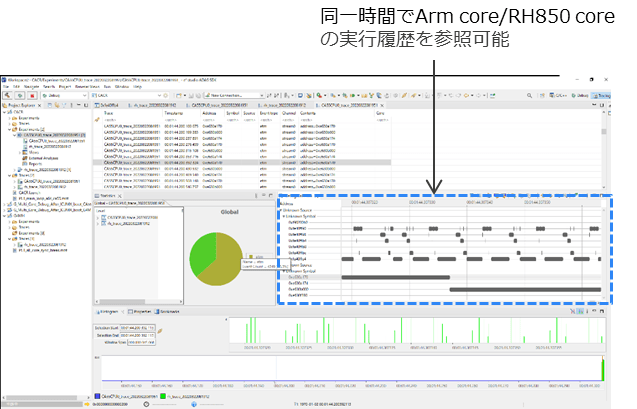
例:問題事象(CR52 State-1)が発生したときのSOC内部のS/W変数やI/Oの状態を参照し、問題事象の特定したいケース