
レーダートランシーバー:ADAS/自動運転のキーコンポーネント
レーダーとは?
レーダー (Radar : radio detection and rangingの略称)は電波を使用して周囲の物体を検出します。レーダーは距離(レンジといいます)角度方向(方位)、速度を測定します。レーダーは第2次大戦時に軍事用として開発されましたが、今日では、航空、海上交通、天文学、海洋観測、気象観測、高度計測、地質調査、そして自動車分野と多くの民間用途で利用されています。
レーダーシステムは特定方向に電磁波(レーダー信号)を発射する送信機を備えています。目標から反射した信号(反射波)を受信機で検出します。反射波の強度は物体の材質、大きさ、形により決まります(レーダークロスセクション:RCS)。反射波を解析することで目標物を識別することができます。
FMCW レーダー
自動車用レーダーシステムは、周波数連続変調(FMCW)と呼ばれる方式で動作します。この方式では、ある周波数の連続波を一定期間Tにわたって周波数変調しながら送信します。このように送信された信号は「タイムスタンプ」付とみることができます。送信波はターゲットに到達し、その一部が反射します。レーダーが受信した反射波を元の信号と混合して比較し、信号処理を行います。簡略化した回路図を図1に示します。
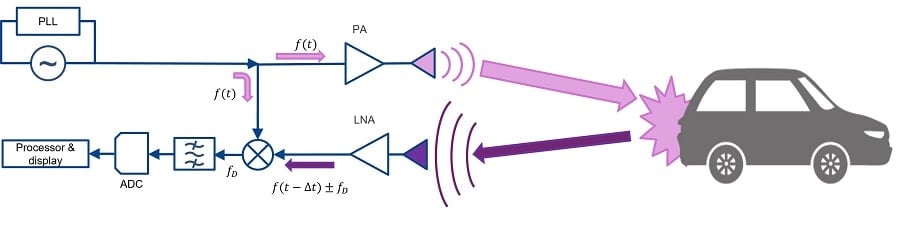
図1:FMCW車載レーダー – 原理と構成要素
レーダー信号の一例を図2と図3に示します。ターゲットからの反射波は送信波と同様な波形をしていますが、ターゲットまでの距離Rに比例した往復分の時間Δtだけ遅れます。cは光速です。
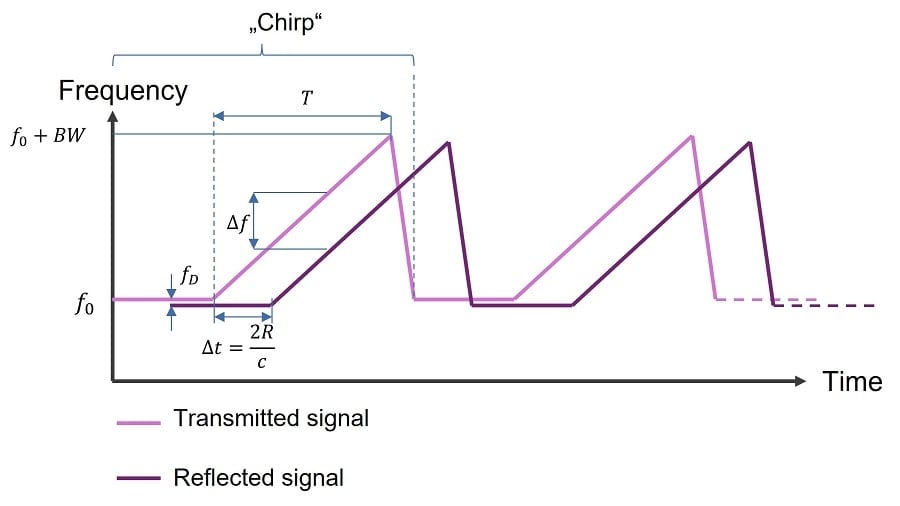
図2:FMCWレーダーのノコギリ波信号:周波数 対 時間
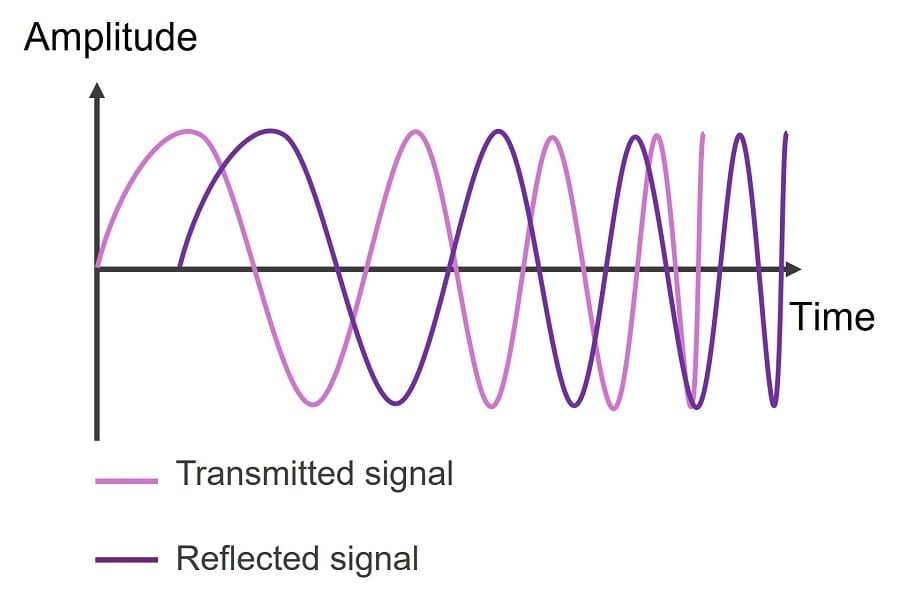
図3:FMCWレーダー信号:振幅 対 時間
ある時間の反射波と送信波を比較することで、周波数の差分Δfを観測することができます。この差分から各送信期間つまり”チャープ”期間内の距離Rが決定されます。さらに、複数回のチャープ期間に渡って信号を計測すると、ドップラー効果により、レーダーに向かって移動するターゲットや、レーダーから遠ざかるターゲットに対しての周波数シフトfDが観測できます。こうして、ターゲットの速度を測定することができます。最後に、間隔を置いて配置されたアンテナを使用して多チャネル構成とすることで、反射波の方位を特定でき、ターゲットの2Dまたは3D位置を特定することができます。
このように4D検出(距離、方位角と仰角の方位、速度)を行うには、信号の時空間的な処理が必要になります。これには信号をデジタル化して保存し、処理する必要があります。最初のステップは、いわゆる「レーダーキューブ」の作成になります。
レーダーデータ処理 - レーダーキューブ
レーダーキューブは、時空間処理したレーダーデータを3次元グラフィック描画したものです。距離、速度、方位の情報を得るためには、3つの基本ステップを必要とします。
上記のように、受信信号をサンプリングしてデータ処理します。最初のステップで行うFFT(高速フーリエ変換)は、それぞれのサンプリングが“Bin”という距離情報に対応し、“ファストタイム”と言われています。これを図4に示します。フレームを構成するそれぞれのチャープでこの処理が繰り返されます。
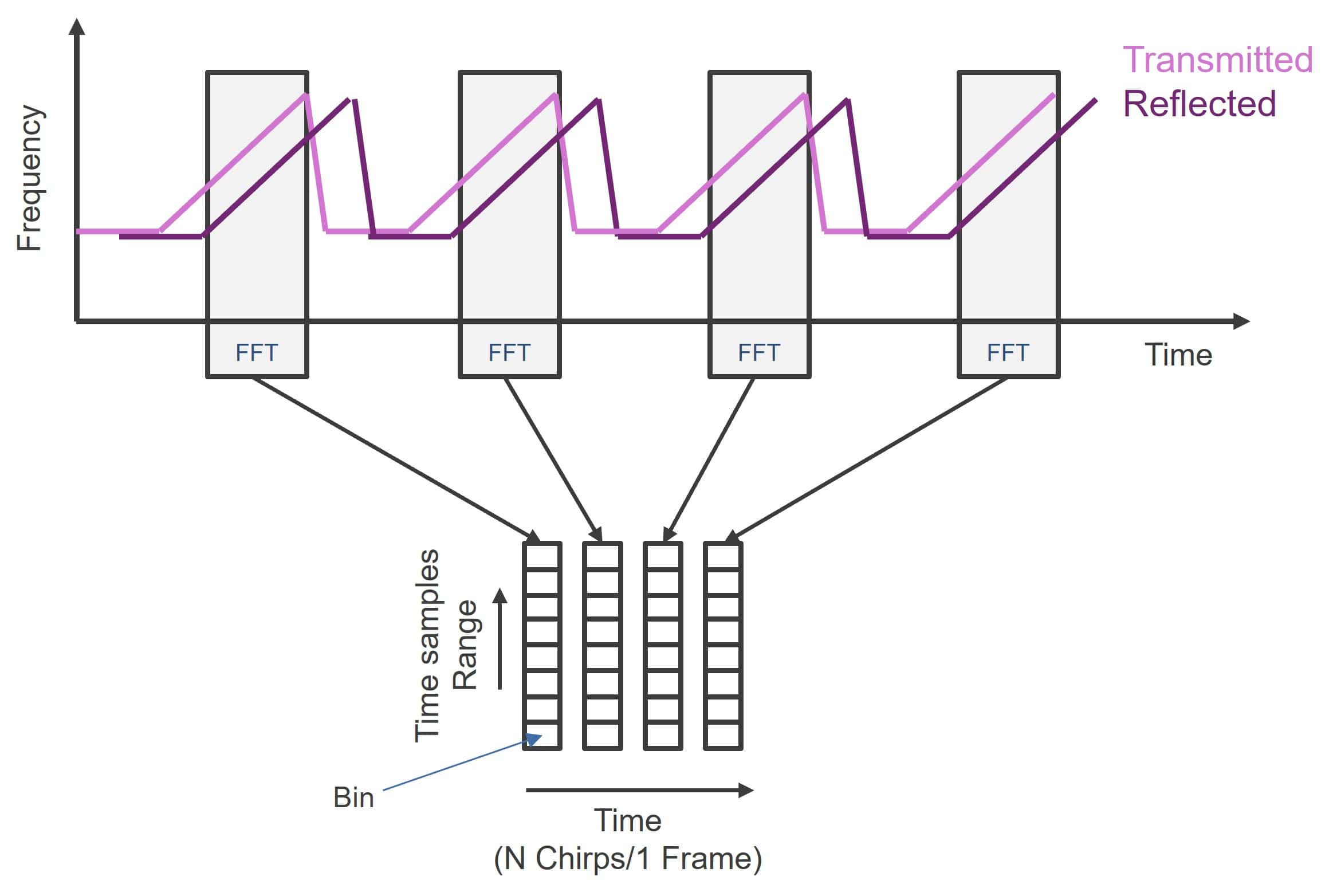
図4:レーダーデータ処理:レンジFFT
フレーム内のすべてのチップが取得、保存、処理されると、ドップラーFFTが実行され、ターゲットの速度に関する情報が得られます。この処理はフレーム毎、つまりN回のチャープに1回行われます。そのため、「スロータイム」とも呼ばれます。最後に、すべての有効チャネルからのデータを組み合わせて、ターゲットの空間的な位置情報からなる3次元のレーダーキューブデータが生成されます。図5にレーダーキューブを図示します。
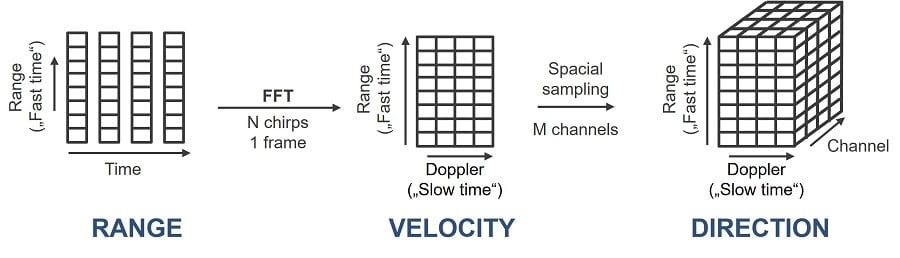
図5:レーダーキューブ
車載レーダーモジュール
車載レーダーは半導体技術、特にシリコンベースの技術進歩によって進化してきました。2010年代の初頭、多チャンネルのレーダートランシーバーはGaAs(ガリウムひ素) MMIC(モノリシックマイクロ波集積回路)に集積されていましたが、近年はシリコンゲルマニウム(SiGe)の使用により高密度に集積化が進み生産コストの低下をもたらしました。次の進化はCMOS(相補型金属酸化物半導体)への移行です。これによりRF性能を維持しながら、チップにデジタル回路を集積できるようになります。
なお、レーダーシステムの実現には、それぞれのレーダーモジュールが1つ以上のMMICトランシーバーを搭載しなければならず、そこではレーダーを放射して物体からの反射波を検出し、さらにアナログ信号処理およびデジタル変換を行ってローデータを生成し、プロセッサーユニットによるデータ解析が行われます。基本的な処理はマイクロコントローラユニット(MCU)を使用しますが、レーダー技術の進歩に伴い、ターゲットをより高度に分析、検出、追跡をするために、SoC(System on Chip)の使用が増えています。
図6は受信経路全体におけるレーダー信号処理の各ステップを示しています。アナログRF処理とデジタル信号への変換はMMICで行われますが、信号解析との境界は定まっていません。レーダー構成や信号処理が複雑化する中、最初のFFTなどの一部の処理はすでにMMICで実行可能です。さらに、コーナーレーダーのような一部のアプリケーションでは、レーダートランシーバーと信号処理ユニットを1つのモノリシックチップにまとめることも可能です。
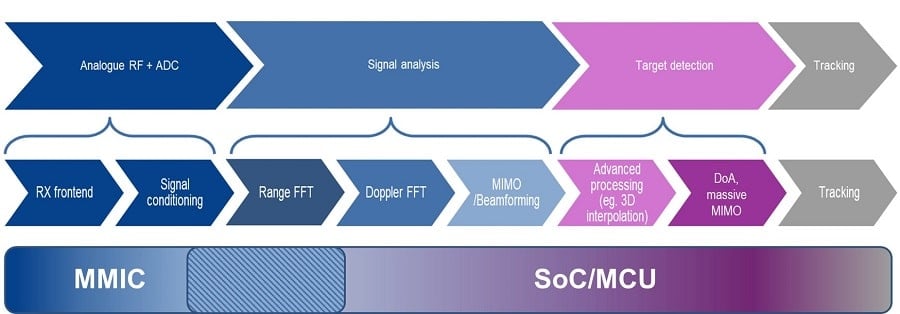
図6:レーダーデータ処理ステップ
将来的には、車の周囲に複数のレーダー(サテライトレーダー)を搭載することで、より複雑なアーキテクチャが実現されるでしょう。レーダーモジュールは限定的なデータ処理のみを行い、距離や点群などのデータを中央制御ユニット(ECU)に送信し、ECUはサテライトレーダーだけでなく、他のセンサーからのデータも含めてより高度なデータ処理やデータフュージョンを行います。
まとめ
今回は、自動車用に使用されているFMCWレーダーの動作原理と、MMICやMCU/SoCを用いた実装について概要を説明しました。次回は、MMICの性能が検出距離にどのように影響するかを見ていきます。