
レーダートランシーバー:ADAS/自動運転のキーコンポーネント
通信技術とセンシング技術との融合により自動車産業は転換期を迎えています。車両周辺環境に応じて、周囲の状況を認識したり、車同士や交通インフラと通信したり、さらには危険が想定される要因を検出したりする機能やシステムが、ますます多くの車に搭載されています。車は自分がどこにいるかを認識し、周囲で何が起こっているかを見て、聞いて、感じることができます。つまり、車が独自の感覚を身につけたと考えることができます。
車載用センサーは道路交通安全を改善し、レベル4や5の自動運転を実現するためのキーテクノロジーです。車両に搭載した先進のセンサーテクノロジーによって、警報を発したり、自律的に安全機能を作動したりすることで交通事故を防ぐことができ、2050年までに交通死亡事故ゼロを掲げるビジョンゼロの実現に近づくのです。実現のため、ヨーロッパ議会は2019年、安全に関わる法律を作成しました。自動速度制御、先進緊急ブレーキシステム、車線維持システムを2022年5月までにすべての新車に、2024年5月までに既存の車にも義務化する法律を作成しました。
また、新車購入時には安全評価がますます重視されるようになっています。そのため、ヨーロッパ新車アセスメントプログラム(Euro NCAP)は2020年から緊急ブレーキシステムを評価項目に加えました。このことは車両に新しい検知機能を搭載することを自動車業界に促しているのです。
ADAS/ADの車載センサー
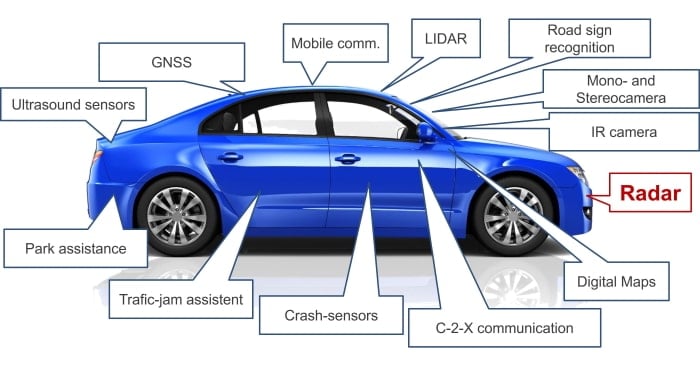
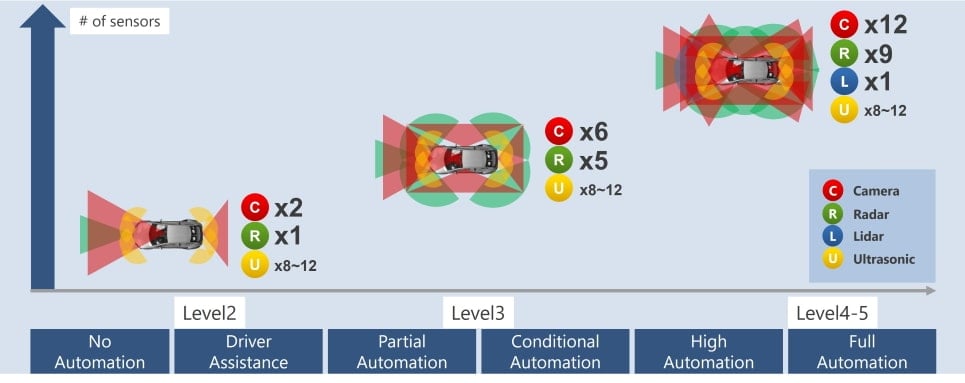
車両周辺環境をセンシングするにはいくつかの方法がありますが、完全自動運転実現のために360度全方位検知を行うには、異なるセンシング技術の組み合わせが必要です。すべてを搭載することで、安全な“コクーン”となって周囲を検知することが可能となり、感覚を身につけた車と例えることができるのです。それぞれのセンサー技術は表1で示すような長所短所があり、完全自動運転には図2のように異なるセンサーを組み合わせが不可欠です。
表 1:車載用センサーの長所と短所
| check長所 | close短所 | |
|---|---|---|
| 単眼カメラ (ビデオ) |
広い視野角 高解像 |
悪天候や夜間の性能が劣る 高い処理性能による高負荷 |
| 超音波 | 悪天候や夜間に影響されない 安価 |
超短距離のみ対応 |
| 赤外光 | 夜間で動作 | 検出距離が短い |
| ライダー | 高い精度(距離、解像度、位置精度) | 悪天候の性能が劣る(霧、雪) 速度計測 |
| レーダー | 天候に影響されない 長距離検出性能 高解像と位置推定性能 |
複雑な角度測定方法 複雑な物体識別 完全自動運転用での実績不足 |
車載レーダー
レーダーは電磁波を送受信することで周囲の障害物までの距離測定、識別、位置推定が可能な技術としてよく知られています。車両は電磁波をよく反射するので、レーダーは車載用途に特に適しており、被検知車両の距離、位置、および速度を正確に計測できます。
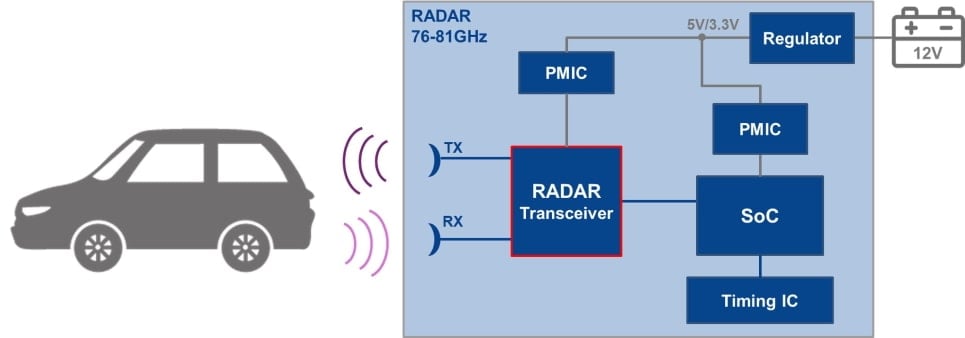
車載用途には、用途に応じた周波数帯と周波数変調連続波 (FMCW) 方式が採用されている。FMCWレーダーの原理は次回紹介します。レーダーの基本的な構成を図3に示します。1つまたは複数のレーダーMMICトランシーバーに、高性能なプロセッサー(MCUまたはSoC)が接続されます。レーダーMMICの数や構成は、図4のように、車両上のレーダーモジュールの位置や適用するアプリケーションにより決まります。
ITU(国際電気通信連合)は安全機能により自動車用レーダーを2つのカテゴリーに分類しています。
- カテゴリー1:快適でストレスのない運転を実現する機能を提供します。このカテゴリーには最大250メートルの測定範囲に対応する車間距離制御装置(ACC)および衝突回避(CA)レーダーが含まれます。
- カテゴリー2:高解像用途向けセンサーを定義しています。後側方モニター、車線変更アシスト、後退時車両検知警報、車両近くの歩行者や自転車の検知など、車両のパッシブおよびアクティブな安全機能を強化します。検出距離はカテゴリー1より短く、用途により50mから100mの最大検出距離となります。このシステムは車両のパッシブおよびアクティブな安全機能を高めることによって交通安全を改善することを目的としています。
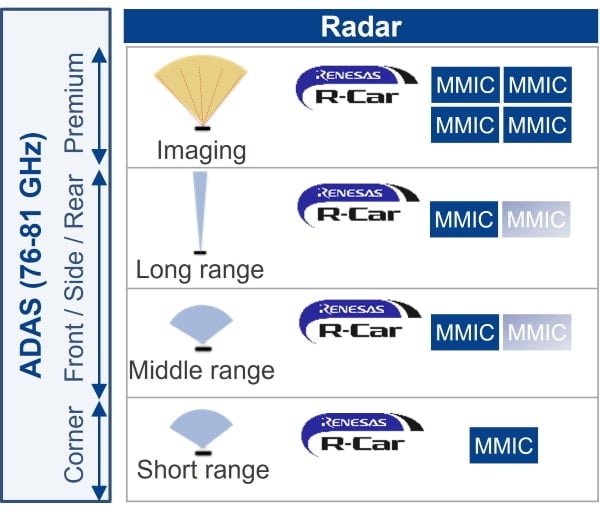
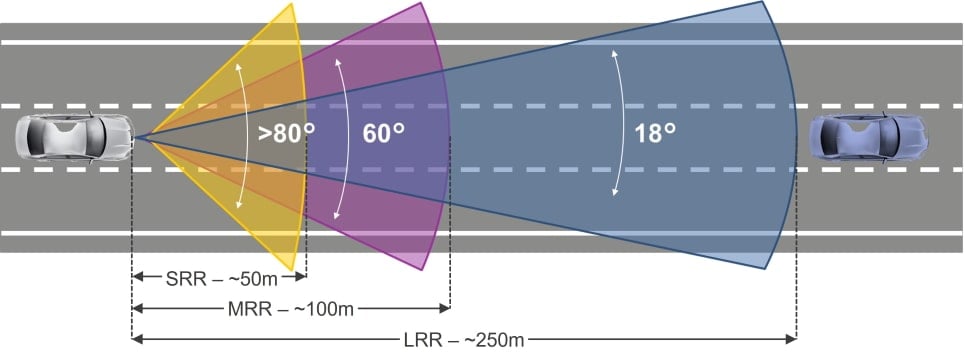
レーダーの測定距離により分類することもできます(図5)
- SRR * : 50mまでの距離を広い視野角と高い解像度で測定します
- MRR* :100mまでの中距離を中程度の視野角で測定します
- LRR* : 高い解像度や広い視野角は必要なく、250m以上のより遠方まで測定することが求められます
*ITU: International Telecommunication Union 国際電気通信連合
SRR: Short Range Radar 短距離レーダー
MRR: Mid Range Radar 中距離レーダー
LRR: Long Range Radar 長距離レーダー
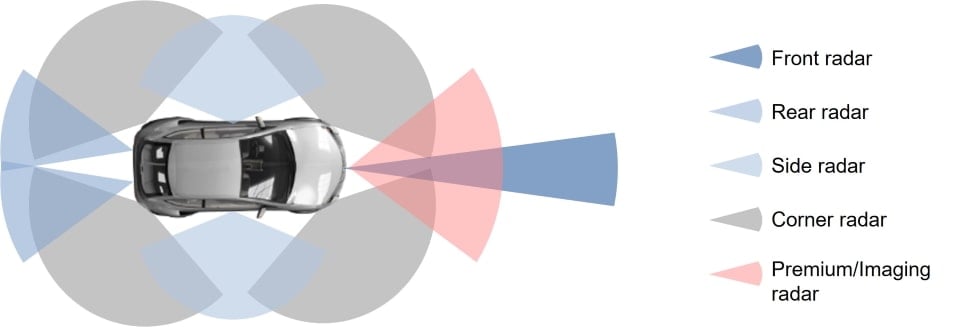
360度をカバーするには役割の異なる複数のレーダーセンサーを図6のように配置します。レーダーで収集した車両周囲の情報はリアルタイムかつ正確に統合されなければなりません。
レーダーセンサーはバンパーやエンブレムなどの部品に容易に埋め込むことが可能で、車体の外観デザインに影響しないよう目立たない位置に搭載することができます。レーダーモジュールのサイズはアンテナサイズが支配的です。アンテナサイズは波長に比例します。つまり周波数に反比例するので、電波の動作周波数が高いほどアンテナサイズは小さくなり、レーダーモジュールを小型化できます。自動車レーダーシステムで使用される主な周波数帯域は4つあり、図7に示します。2つはKバンド(約24GHz)、2つはEバンド(76〜81GHz)です。
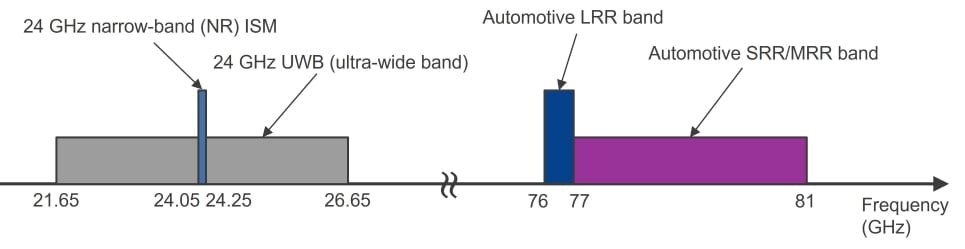
しかし、24GHzバンドは天文観測用や地球探査用電波との干渉が懸念されることから車載レーダーとしての利用が停止されることになっています。代替として、76〜81GHzが車載レーダー用として多くの国で承認されてきました。表2にように、76〜77GHzの1GHz帯が長距離レーダーとして、77〜81GHzの4GHz帯はより高解像度での検知を必要とする用途に使用されます。
表2:76~81GHz帯車載レーダーの特性 (ITU-RM.2057-0による分類)
| タイプ (ITUの分類) |
A | B | C | D | E |
|---|---|---|---|---|---|
| 前方長距離レーダー | 前方高解像レーダー | コーナー高解像レーダー | 後方高解像レーダー | 超短距離高解像レーダー | |
| 用途 | ACC*, CA* | 車線モニター | BSD*, LCA* | RCTA* | 駐車支援,歩行者検知, 低速時緊急ブレーキ |
| 検出距離 | ≤250m | ≤100m | ≤100m | ≤100m | ≤50m |
| 距離解像度 | 75cm | 7.5cm | 7.5cm | 7.5cm | 7.5cm |
| 周波数帯 | 76-77 GHz | 77-81GHz | 77-81GHz | 77-81GHz | 77-81GHz |
| 最大バンド幅 | 1GHz | 4GHz | 4GHz | 4GHz | 4GHz |
| アンテナ最大電力e.i.r.p. | 55dBm | 33dBm | 33dBm | 45dBm | 33dBm |
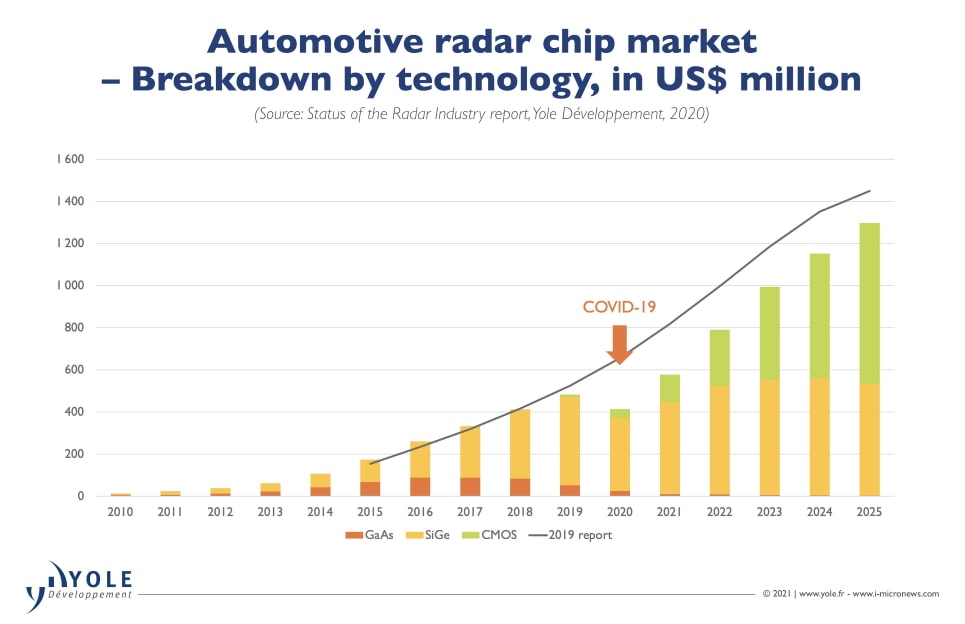
レーダーの市場
新車へ新しい安全機能や快適装備の搭載が進み、レーダー市場は盛り上がりを見せています。図8に示すように、車載セグメントはレーダー市場で最も成長が期待される市場で、2025年には100億USドルを超える規模への成長が予想されています。
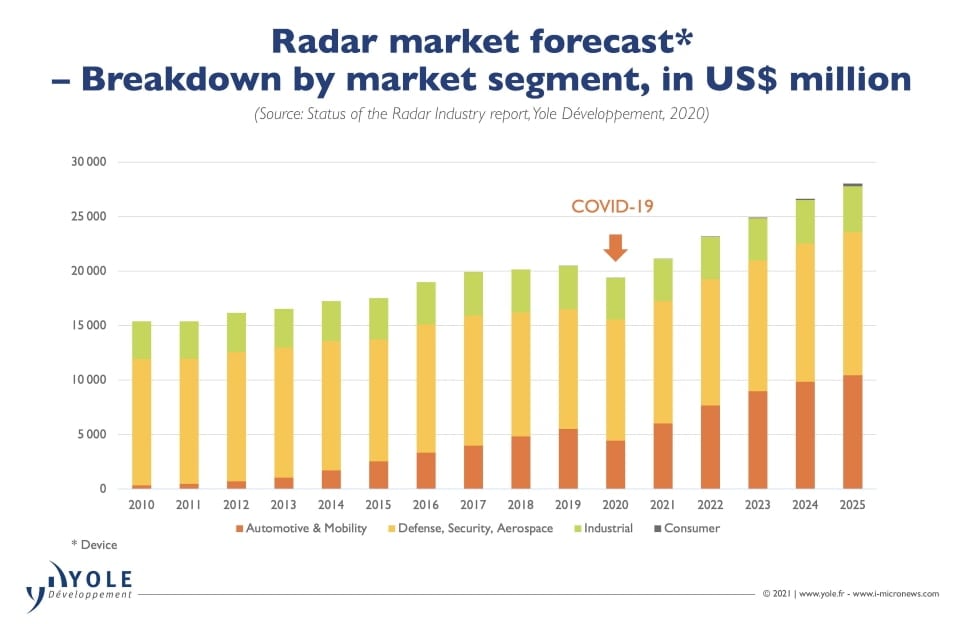
レーダートランシーバーの市場は12億USドルを超える市場規模が見込まれており、なかでもCMOSチップは、GaAsチップがほとんど消滅するなか、急速に成長し2025年までには大半を占めるようになると予想されています。
まとめ
レーダーモジュールは近年、自動車に標準搭載されるようになってきました。他のセンサーテクノロジーと比べて距離分解能において劣るところはありますが、信頼性や汎用性の面で近年のADAS/ADシステムにとって代えのない部品となっています。76〜81GHzの高い周波数への移行は新しい技術的な課題をもたらしますが、半導体分野にとって新たな発展をもたらす注目すべき領域となるでしょう。
次回はFMCWレーダーの基本原理について見ていきます。
