
レーダートランシーバー:ADAS/自動運転のキーコンポーネント
- Blog 1: レーダーはなぜ必要か?
- Blog 2: FMCWレーダーの基本
- Blog 3: 距離測定:レーダーはどこまで検知できるか?
- Blog 4: レーダーの解像度:レーダーはどの程度の精度が出せるのか?
- Blog 5: レーダーアーキテクチャ:複数のレーダーセンサーを接続する
アーキテクチャの進化
これまでのレーダーブログでは、より高いレベルの自律性と安全性を実現するために、センサー全般、特にレーダーモジュールの数が大幅に増加することを取り上げてきました。図1に示すように、今後数年間でレーダーモジュールは追加搭載される見込みであり、レベルL1の運転支援やNCAP(new car assessment programme)1~4の前方監視レーダーのみの基本構成から、標準車ではレベルL2+の運転支援やNCAP4~5まで、高級車ではレベルL3~L4の自動運転やNCAP5までに対応することになるでしょう。

図 1. NCAP評価と自動運転レベルに対応する車載レーダー
車両機能のセントラル化に伴い、中央演算処理装置の性能が急速に向上することが予想されます。そうなると、センサモジュールで演算処理を行わない方が、より効率的にデータ処理を行うことができるでしょう。このことは、車のE/Eアーキテクチャを分散型アーキテクチャに進化させることにつながります。もちろん、完全な分散型アーキテクチャへの移行には長い時間がかかり、2030年以降に完了すると予想されています。それまで、市場では部分的な実装が進むでしょう。
第一段階として、ADASなどの特定機能用途のドメインコントローラ(DCU)が搭載されます。その後、自動運転のレベルに応じて、DCUの数は増えていくでしょう。レベルL2+の運転支援が必要になると、DCUとともにゾーンコントローラが導入されます。最終的には、センサーが接続されたゾーンコントロールユニットを介してセントラルコンピュータに接続された集中型E/Eアーキテクチャとなります。この進化を図2に示します。もちろん、これはソフトウェアが急速に複雑化するとともに、車両内ネットワークの大容量化が必要となります。

図 2. E/Eアーキテクチャのメガトレンド(出典:ルネサスエレクトロニクス、David Xu氏)
新たに導入されるE/Eアーキテクチャでは、図3に示すようにレーダー処理の一部がレーダーモジュール上で行われず(エッジコンピューティング)、非ローカル化されることで効率的に計算を行うようになります。各モジュールや制御ユニットでの処理量は、求められる性能と利用可能なアーキテクチャによって決定されます。

図 3. レーダーデータ処理過程
スマートレーダーセンサー
今日のレーダーアーキテクチャは、個々に独立したレーダーモジュールが車両の周囲に配置された構成となっています。各モジュールは、レーダートランシーバーを搭載し、検出されたデータをオンボードで処理する性能を備えており、図4に示すように、シングルチップで処理するか、同じモジュール上の別のマイクロコントローラーかSoCで処理します。

図 4. エッジ処理のスマートセンサー
処理されたレーダーデータは、各「スマートレーダーセンサー」からCANバスを経由して転送され、遠方のDCUで融合されます。図5には、さまざまな処理過程とその実行順序が示されています。

図 5. スマートレーダーセンサーとドメインコントロールユニットによるレーダー信号処理
センサーの数が十分であれば、車両周囲の障害物を認識することができます。例えば、図6の場合、ADAS ECUは、前方の長距離レーダー(LRR)で検出した物体の情報と、4つのコーナーの短距離・中距離レーダー(SRR/MRR)からの情報を受け取り、周囲の全体像を作成します。

図 6. スマートセンサー(エッジ処理)とドメインコントローラーを備えたレーダーアーキテクチャの例
サテライトレーダーセンサー
集中型アーキテクチャの導入とともに、将来的には、データ処理の一部がレーダーモジュールから分離されるでしょう。図7に示すように、サテライトレーダーユニットは、遠方のECU(ドメインまたはゾーンコントローラ)にデータ転送する前に、受信したレーダー信号処理の一部、例えばレンジFFTのみを実行します。こうなるとレーダーモジュール自体は「スマート」と言えなくなります。
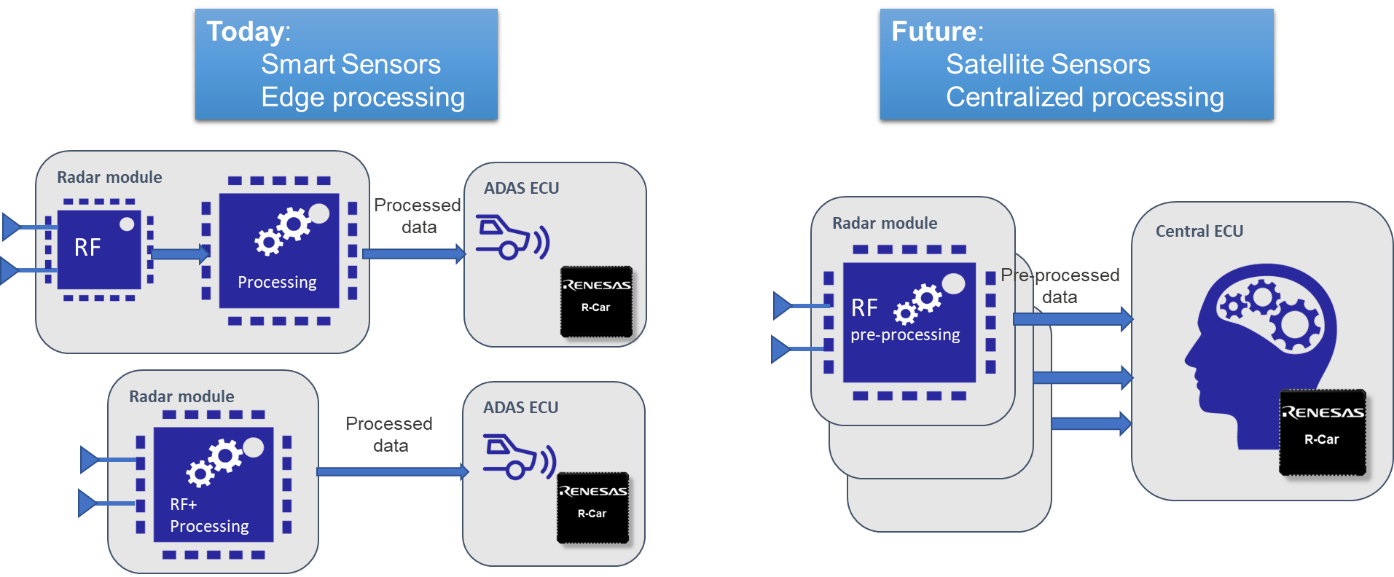
図 7. セントラル処理のサテライトセンサー
それぞれのサテライトレーダーモジュールでデータ処理の一部が実施され、そのデータをECUが受信し、受信した各データセットに対して主要なレーダーデータ処理過程を実行します。処理した結果は他のセンサーからの情報と融合することで、認識の精度を高めることができます。図 8 にそれぞれの処理過程を示します。

図 8. サテライトレーダーとセントラルECUにおけるレーダー信号処理
サテライトレーダーモジュールを用いた集中型アーキテクチャの実装では、データは車両のイーサネット網を経由してECUに転送されます。前方監視レーダーやイメージングレーダー(LRR/Imaging)などは、大量のレーダーデータを要求するのでスマートセンサーが使用され、レーダーのすべてのデータ処理は依然としてエッジで実行されます。一方では、複数のサテライトレーダーを車両の周囲に配置し、360°周囲を認識できるようにしています。例えば、図9のアーキテクチャでは、コーナーレーダー(SRR/MRR)と超短距離レーダー(USRR)は受信したデータを前処理し、必要であればデータ圧縮して送信し、さらなるデータ処理をゾーンECUで実行します。

図 9. サテライトモジュールと遠隔プロセッサを搭載したゾーンECUベースのレーダーアーキテクチャ例
集中型アーキテクチャにおいてサテライトレーダーモジュールを使用すると、さまざまな利点が得られます。
まず、サテライトレーダーモジュールはよりシンプルになり、サイズとコストが削減されます。また、必要であれば、修理やアップグレードも容易です。特に、ヘッドライトのように高温になる部品の近くに配置されるモジュールでは発熱の問題も軽減されるでしょう。
データ転送に車載イーサネット網を使用することで、ケーブルコストと重量を最適化することができます。もちろん、イーサネットの伝送にはセキュリティ対策が必要です。また、他のセンサーからのデータと合わせて保存や処理が容易なデータ形式となります。
データ処理に車両のコントロールユニットを使用することで、レーダーデータの処理効率が大幅に向上するだけでなく、より複雑な演算も可能になります。カメラやライダーなど他のセンサーとのデータフュージョン、機械学習や人工知能を利用して、周辺環境のセンシングと解析を最適化できるようになり、より高度な自動運転の実現に貢献できるようになります。
まとめ
将来的には、車両のE/Eアーキテクチャは、集中型演算処理ソリューションへと進化していきます。数年は、異なるアーキテクチャが共存し、スマートセンサーとサテライトレーダーの両方が使用されることになるでしょう。主な相違点を以下の表にまとめました。
表 1. スマートセンサーとサテライトセンサーの比較
| Radar Module | "Smart Sensor" | Centralized (Satellite) | |
|---|---|---|---|
| Processor location | Radar module/chip | Zonal/Central ECU | |
| Radar output | Processed data (objects) | Processed data (point cloud) | Raw data/Range FFT |
| Network type | CAN | 100Mb Ethernet | Gb Ethernet |
先に述べたように、より高い演算性能を持つ集中型アーキテクチャへの移行には、車両全体で高速通信が利用可能であることが必要です。近い将来、このアーキテクチャは、車両のイーサネット網に依存することになるでしょう。ただし、さらに将来世代ではMIPI A-phyなども候補です。
ルネサスは、R-Car Gen4シリーズをベースとしたECUと、スマートレーダーやサテライトレーダーユニットに向けた革新的なコンポーネントを有しており、将来の自動車に向けた先進ソリューションの提供に取り組んでいます。
ウィニング・コンビネーション
ニュース&各種リソース
| タイトル | 分類 | 日時 |
|---|---|---|
| ルネサス初、業界トップクラスの精度と低消費電力を両立した車載用レーダトランシーバ「RAA270205」を開発 | ニュース | 2022年11月16日 |