概要
GR-CITRUSはRubyが気軽に使える小型ボードです。Visual Studio CodeでRubyプログラムができます。VSCode Extension「Rubic」を参照してください。また、Chrome AppのRubicも使用可能です。
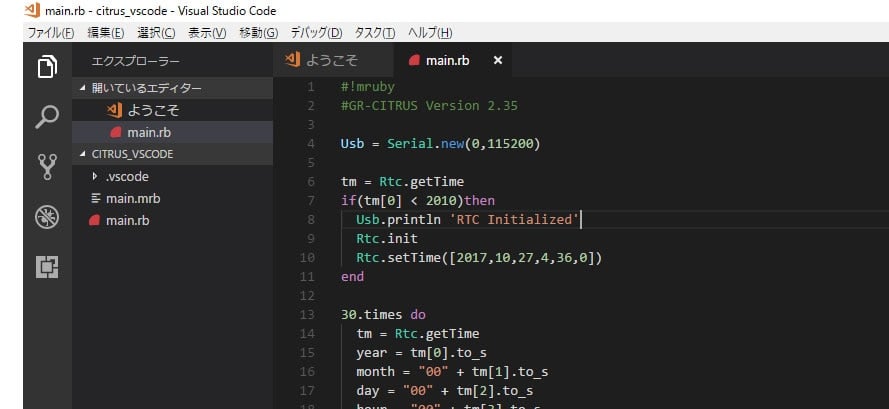
初めてのRubyプログラム 1.1.Visual Studio Codeのインストール
RubyだけでなくArduinoと互換性のあるスケッチをすることも可能です。また、ESP8266を搭載したボード「WA-MIKAN」と組み合わせることでWiFi通信やマイクロSDカードを使ったシステムをプロトタイプすることができます。
GR-CITRUS-FULLの主な機能
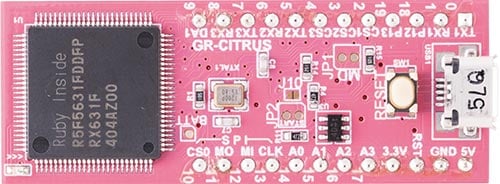
GR-CITRUS (-FULL)
- ルネサス32ビットマイコンRX631グループMCUを搭載
- Arduino Pro Miniと互換性のあるピン配置。
- -FULLはWA-MIKANにすぐ接続できるピンヘッダ付き
(写真はノーマルタイプでピンヘッダなし)
WA-MIKAN (-FULL)
- Wi-Fiモジュール「ESP8266」、マイクロSDソケット搭載
- -FULLはGR-CITRUSに接続するための10mm長足ピンソケットを搭載。
(写真はFULLタイプでピンソケットあり)

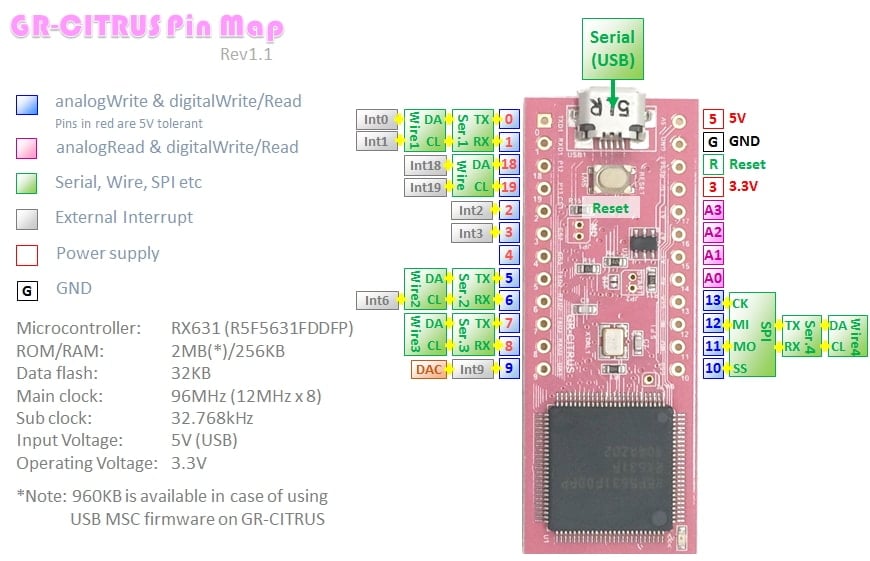
GR-CITRUSピンマップ
詳細仕様
搭載マイコン
RX631(R5F5631FDDFP 100pin QFP)
ROM/RAM
2MB/256KB
Data Flash
32KB
動作周波数
96MHz (外部発振12MHzを8逓倍)
サブクロック
32.768kHz
動作電圧
3.3V
ボード搭載
リセットスイッチ、20ピン拡張インタフェース、ユーザ用LED
関連情報
プログラム作成・書き込み
- Rubicではじめよう! Ruby編
- WebコンパイラでArduinoスケッチ
- IDE for GRでArduinoスケッチ(Win/Mac)
- Milkcocoaでクラウドアクセス!
- MP3, WAVファイル再生 マイクロSDカード編
- MP3, WAVファイル再生 内蔵ROM編
回路・デザイン
GR-CITRUS Schematic (PDF)
スケッチリファレンス
- GR-CITRUSスケッチリファレンス
Rubyファームウェア
GR-CITRUSのRuby用ファームウェアです。ファームウェアを書き込む場合は、GR-CITRUSのリセットボタンを押してUSBメモリとして認識後、binファイルをコピーしてください。最新はファームウェアの状況はGithubを参照してください。
e2 studio用プロジェクト
Eclipseをベースにした開発環境e2 studioでスケッチを行うためのプロジェクトファイルです。e2 studioのダウンロードとインストールについてはe2 studio製品ページを参照してください。
- クリックしてダウンロードしてください。e2 studioのメニュー「ファイル」→「インポート」から、既存ワークスペースとしてアーカイブファイル(zip)のままインポートできます。
Citrus Sketch v223 Project File (ZIP)
注意:このプロジェクトはe2 studio version 7.6でエクスポートしました。
USBマスストレージファームウェア
製造時に書き込まれるファームウェアです。書き込むためにはRenesas Flash Programmerをインストールする必要があります(Windowsのみ)。また書き込む際はGR-CITRUS上のMDジャンパーをクローズし、USBダイレクト接続でのフラッシュ書き込みモードにする必要があります。
Version bでボリュームラベルが「GR-CITRUS_b」になります。Version bでは、bin書き込み領域が528KBから960KBに拡張されます。なお、PCのOSによってはストレージに対して、隠しファイルを書き込む場合があり、実際の書き込み領域が縮小されることがあります。
GR-CITRUS USB Mass Storage Firmware (ZIP)
(version b, 2017/11/7)
技術サポート情報
- お問合せE-mail gadget_renesas@lm.renesas.com
