概要
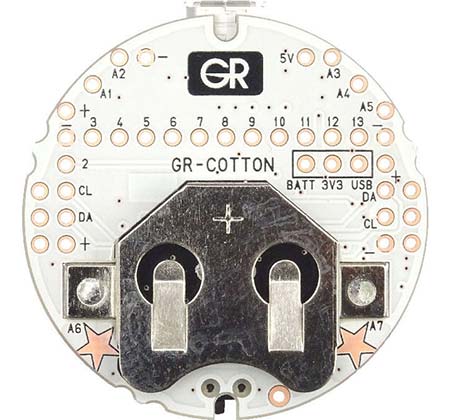
GR-COTTONは、白くて丸い基板にフルカラーLEDを搭載し、光とデザインをつなぎやすくするボードです。コイン電池(CR2032)を取り付けることができ、USBケーブル(マイクロBタイプ)でプログラム書き込みができるため、LEDの動作確認からデザイン工作への応用がスムーズにできます。
例えば万華鏡を覗いたら美しく光っている、あるいは鳥の巣から発せられる光をスマホで見たら、なんと温度や湿度が表示される、そのような可視光通信の体験も身近にするボードです。
GR-KURUMIと同様のマイコンRL78/G13を採用しており、Arduinoと互換性のあるスケッチができます。

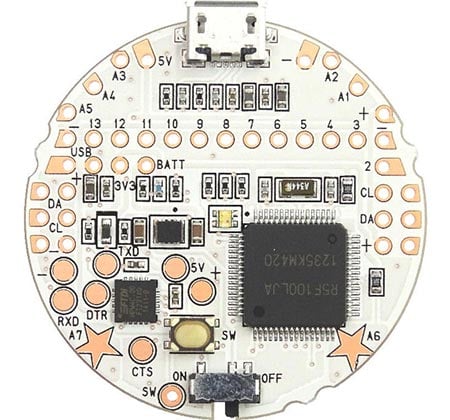
GR-COTTON
- ルネサス16ビットマイコンRL78/G13グループMCUを搭載
- 裏面にはCR2032を装着できるホルダーを実装。
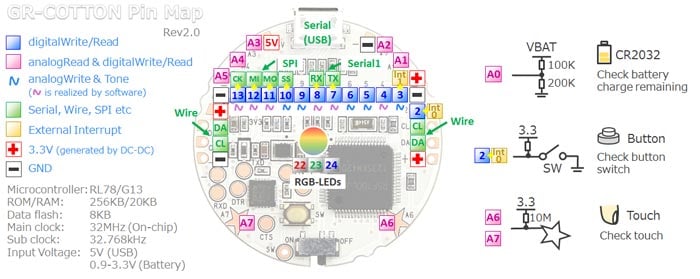
GR-COTTONピンマップ
詳細仕様
搭載マイコン
RL78/G13 (R5F100LJAFB 64pin LFQFP)
ROM/RAM
256KB/20KB
Data Flash
8KB
メインクロック
32MHz (マイコンに内蔵)
サブクロック
32.768kHz
動作電圧
3.3V※
※マイコンの動作電圧は1.6V~5.5V
関連情報
回路・デザイン
- gr-cotton_schematic_20160114_001.CE3 (PDF)
- 部品表
- GR-COTTON Layout (PDF)
スケッチリファレンス
- GR-COTTONスケッチリファレンス
プログラム作成・書き込み
- GR-COTTON特設ページ
e2 studio用プロジェクト
Eclipseをベースにした開発環境e2 studioでスケッチを行うためのプロジェクトファイルです。e2 studioのダウンロードとインストールについてはe2 studio製品ページを参照してください。
- クリックしてダウンロードしてください。e2 studioのメニュー「ファイル」→「インポート」から、既存ワークスペースとしてアーカイブファイル(zip)のままインポートできます。
Cotton Sketch v204-e2v7 Project File (ZIP)
補足:e2 studio Version 7.2でエクスポートしたプロジェクトです。
技術サポート情報
- お問合せE-mail gadget_renesas@lm.renesas.com
