概要
GR-KURUMIは、RL78ファミリRL78/G13グループMCU用のGRリファレンスボードで、Arduino Pro Miniと互換性があります。 主な特徴は小ささに加えて電池一本で動くこと、省電力モードや、時計、フルカラーLEDを搭載していることです。
GR-KURUMI
- ルネサス16ビットマイコンRL78/G13グループMCUを搭載
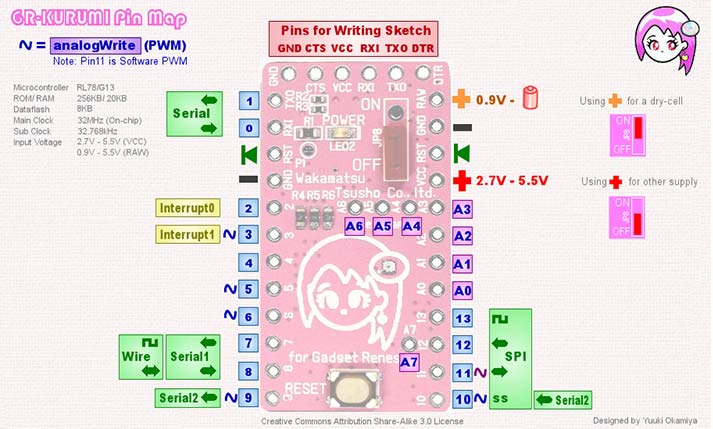
GR-KURUMIピンマップ
詳細仕様
搭載マイコン
RL78/G13 (R5F100GJAF B 48pin QFP)
ROM/RAM
256KB/20KB
Data Flash
8KB
メインクロック
32MHz (マイコンに内蔵)
サブクロック
32.768kHz
動作電圧
2.7V~5.5V※
※マイコンの下限は1.6Vですが、ライブラリ仕様上2.7Vからサポート
関連情報
e2 studio用プロジェクト
Eclipseをベースにした開発環境e2 studioでスケッチを行うためのプロジェクトファイルです。e2 studioのダウンロードとインストールについてはe2 studio製品ページを参照してください。
- クリックしてダウンロードしてください。e2 studioのメニュー「ファイル」→「インポート」から、既存ワークスペースとしてアーカイブファイル(zip)のままインポートできます。
GR-KURUMI Sketch v204-e2v7 Project File (ZIP)
補足:e2 studio Version 7.2でエクスポートしたプロジェクトです。
技術サポート情報
- お問合せE-mail gadget_renesas@lm.renesas.com
