RA6M5 MCUグループ評価キット
EK-RA6M5 評価キットを使用すると、RA6M5 MCU グループの機能を容易に評価できると共に、RAファミリが持つルネサス独自のFlexible Software Package (FSP)と様々なIDEを使用して、組込みシステム向けアプリケーションを開発することができます。
micro-ROS は 多くのロボットシステムで採用されているROS(Robot Operating System)の第二世代であるROS 2をマイクロコントローラで使用するためのオープンソースプロジェクトです。ROS 2ノードをマイクロコントローラ上に実現し、共通のフレームワークを使用することで、従来のロボットやIoTセンサ及びデバイスとの相互運用を可能とします。

ルネサスはmicro-ROS フレームワークの第一人者であるeProsima社と協業し、RA6M5によるROSベースのロボットボディコントローラを開発、micro-ROS実装に最適なプラットフォームをご提供することによって、設計プロセスの簡素化を実現します。また、RA6M5/RA6T2ベースのマイクロROSプロジェクトは、物流・倉庫用のサービスロボット、セキュリティ、農業、ヘルスケアなど、様々なアプリケーション設計におけるリスク低減に貢献いたします。
Renesas micro-ROSソリューションに関するお問合わせはこちら:[email protected]
特徴
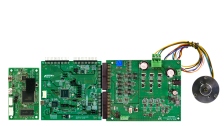
このシステムは、ロボットオペレーティングシステム(ROS)をベースに、複数のサーボ制御を可能にします。 ROSは、オープンソースとして多数の企業で確保しているソフトウェアライブラリとツールのセットで、デザイナーがロボットアプリケーションを開発するのに役立ちます。
EK-RA6M5 評価キットを使用すると、RA6M5 MCU グループの機能を容易に評価できると共に、RAファミリが持つルネサス独自のFlexible Software Package (FSP)と様々なIDEを使用して、組込みシステム向けアプリケーションを開発することができます。
MCK-RA6T2は永久磁石同期モータ(ブラシレスDCモータ)を使ったモータ制御の評価を簡単に行うことができる開発キットです。本製品と、ウェブサイトからダウンロードできるサンプルコードやQE for Motorを使うことで、RA6T2を用いたモータ制御評価をすぐに始めることができます。
| Software title
|
Software type
|
会社名
|
|---|---|---|
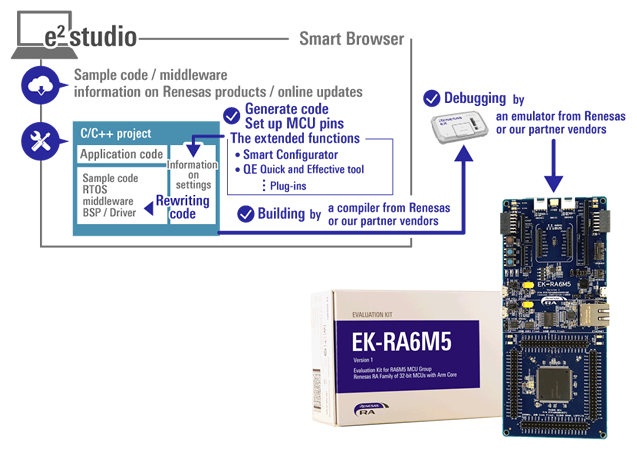
| 統合開発環境 e² studio Eclipseベース ルネサス統合開発環境
[Support MCU/MPU: RA, RE, RX, RL78, RH850, Renesas Synergy, RZ]
|
IDE and Coding Tool | ルネサス |
1件
|
||
| RA MCUとmicro-ROSによるロボット設計プロセスの効率化 | ブログ | 2023年3月27日 |
| ルネサスとeProsima社は共同で、ロボット開発用フレームワークのmicro-ROSをRAマイコンに実装、産業およびIoT分野でのロボット導入を促進 | ニュース | 2021年9月2日 |