概要
GR-ROSEは、ロボットやIoTのプロトタイピング用小型ボードです。Arduinoスケッチ+ROS2(Robot OS)でロボット動作における分散処理を簡単化します。人間にあたる中脳、脊椎・神経の役割を想定してます。
小型で且つシリアルサーボや、センサ、電源を接続するためのインタフェースが用意されているため、ロボットに組み込みやすくなっています。AWS FreeRTOSを利用したマルチタスク化や、AWS IoTへの接続も可能です。
認証
CE, EU RoHS, 中国 RoHS
ESP-WROOM-02Dについては、Espressifのサイトを参照してください。
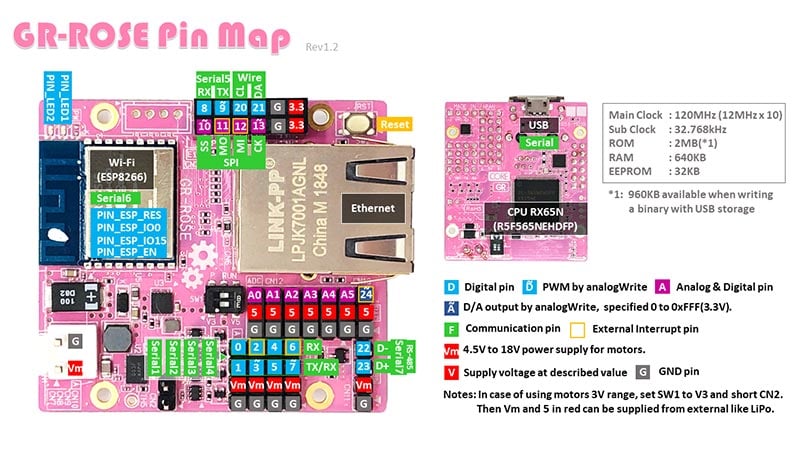
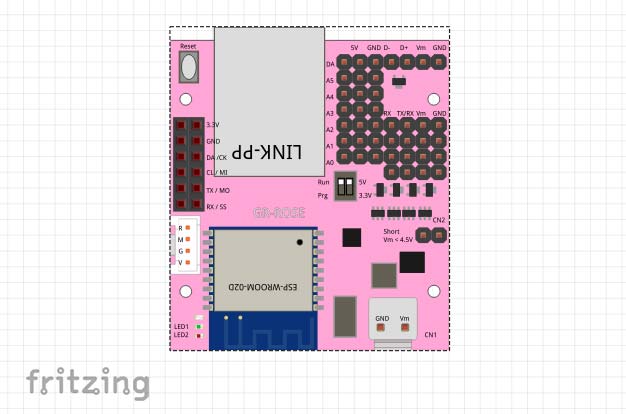
GR-ROSEピンマップ
仕様
搭載マイコン
RX65N (R5F565NEHDFP 100ピンQFP)
RXv2コア [34 CoreMark/mA]ROM/RAM
2MB/640KB
動作周波数
120MHz(12MHz 10逓倍)
RTCクロック
32.768kHz
センサー
温度(マイコンに内蔵)
ROS用I/F
Ethernet, USB (rosserial)
シリアルサーボ用I/F
TTL x 4, RS-485 x 1
アナログI/F
ADC(12bit) x 6, DAC x 1
Wireless
IEEE 802.11b/g/n
PMOD用I/F
1 (I2C, SPI, UART)
外部電源入力
USB VBUS or 4.5V~18V
外部電源出力
3.3V, 5V
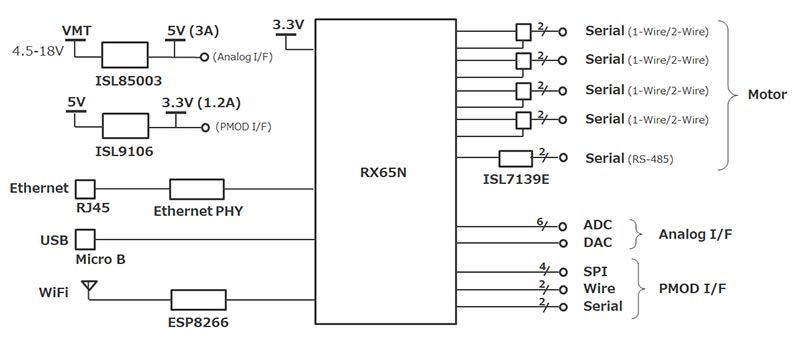
ブロック図
関連情報
ソフトウェア開発環境
オープンソースのROS2向けソフトウェアスタックと、3タイプの開発環境を用意しています。

プログラム作成
- WebコンパイラでArduinoスケッチ!
- IDE for GRでArduinoスケッチ!
- IDE for GR(オフライン, Arduinoライク)
e2 studio(オフライン, プロ向け)
e2 studioのメニュー「ファイル」→「インポート」から、既存ワークスペースとしてアーカイブファイル(zip)のままインポートできます。
- GR-ROSEスケッチソース(GitHub)
- 近藤科学ロボアーム「KXR-A3S」を動かしてみよう!
- デバッガを接続しよう
回路・デザイン
- GR-ROSE Schematic (PDF)
- GR-ROSE Dimension (PDF)
- 部品表
スケッチリファレンス
(Arduinoライク)
- GR-ROSEスケッチリファレンス
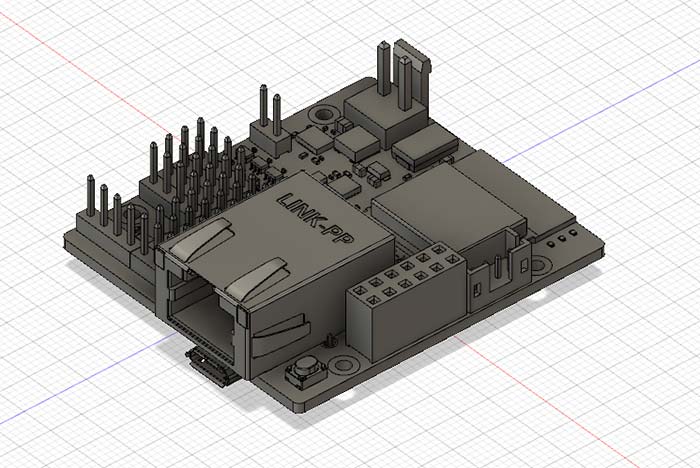
Fusion 360用3Dデータ
Autodesk Fusion 360でインポートできる3Dデータです。GR-ROSE用のケースなどを作るときに活用してください。
- GR-ROSE Autodesk Fusion (ZIP)
Fritzing用データ
Fritzingでインポートできるデータです。ブレッドボードの配線が簡単に行えます。(Designed by ksekimoto)
MicroPython
![]()
GR-ROSEはMicroPythonを実行できます。(Published in GitHub by ksekimoto)
GR-ROSEのリセットボタンを押した後、以下のbinファイルをコピーすることで、MicroPythonが実行されます。
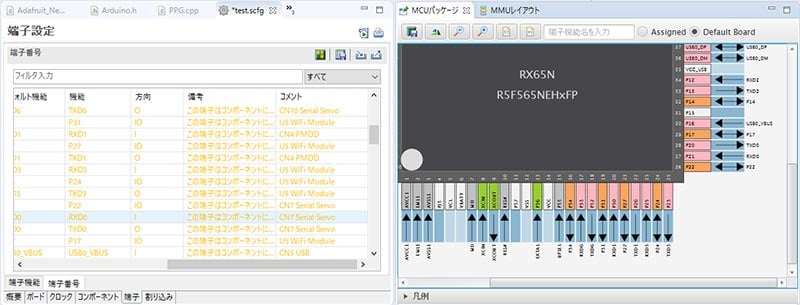
e2 studio用ボード定義ファイル(BDF)
e2 studioで使用可能なGR-ROSEのボード定義ファイルです。 新規にGR-ROSEのソフトウェアを開発する際に役立ちます。
GR-ROSE Board Definition File (ZIP)
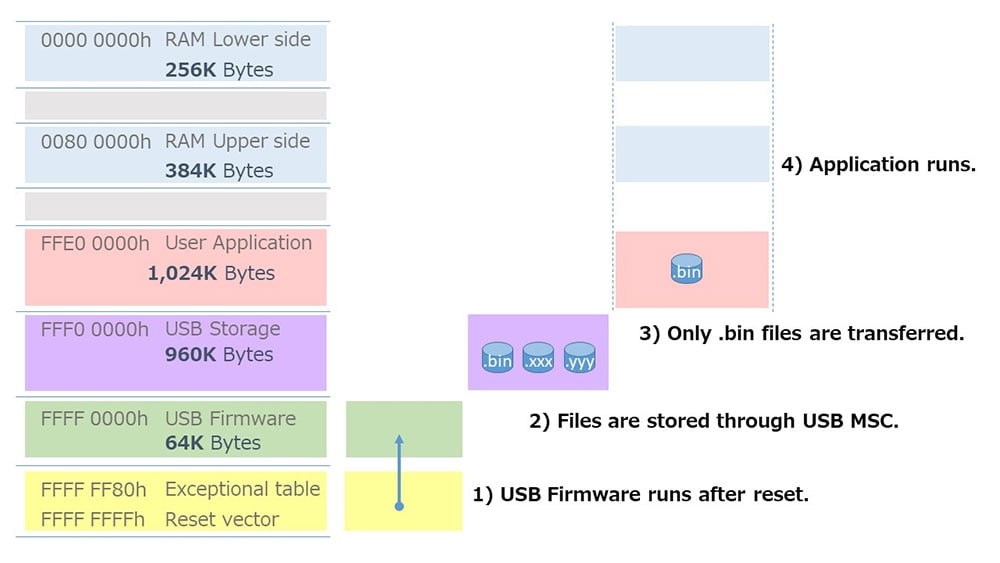
出荷時USBファームウェア
出荷時はマイコンにUSBファームウェアが書き込まれています。リセットボタンを押すことでストレージとなり、binファイルをコピーするとユーザーアプリケーションとして実行されます。
USBファームウェア
GR-ROSEのSW1を「P」にセット後にUSBを接続すると、Renesas Flash Programmer(RFP)によってmotファイルを書きこむことができます。
注: 本ファームウェアは初回出荷時のファームウェアから以下の変更がされています。
- ユーザアプリにジャンプ時、CMT0が停止されます。
- VBUSやVMOTから電源供給時にリセットボタンを押した場合、USBポートが開いていなければユーザーアプリにジャンプします。
以下はe2 studioのプロジェクトファイルです。コンパイルにはCCRXが必要です。e2 studioのダウンロードとインストールについてはe2 studio製品ページを参照してください。
e2 studioのメニュー「ファイル」→「インポート」から、既存ワークスペースとしてアーカイブファイル(zip)のままインポートできます。
補足:e2 studio 7.2でエクスポートしたプロジェクトです。
技術サポート情報
- お問合せE-mail gadget_renesas@lm.renesas.com
